

Nash game control method for automatic driving, steering and braking under emergency avoidance conditions
An emergency avoidance and automatic driving technology, which is applied in the field of automobile intelligent interaction, can solve problems such as the inability to guarantee safe driving, and does not consider the conflict between the braking and steering systems, so as to achieve improved safety and stability, strong practicability, and reasonable distribution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0133] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings by taking the tracking path as an example with double shifting lines, so that those skilled in the art can better understand the present invention.
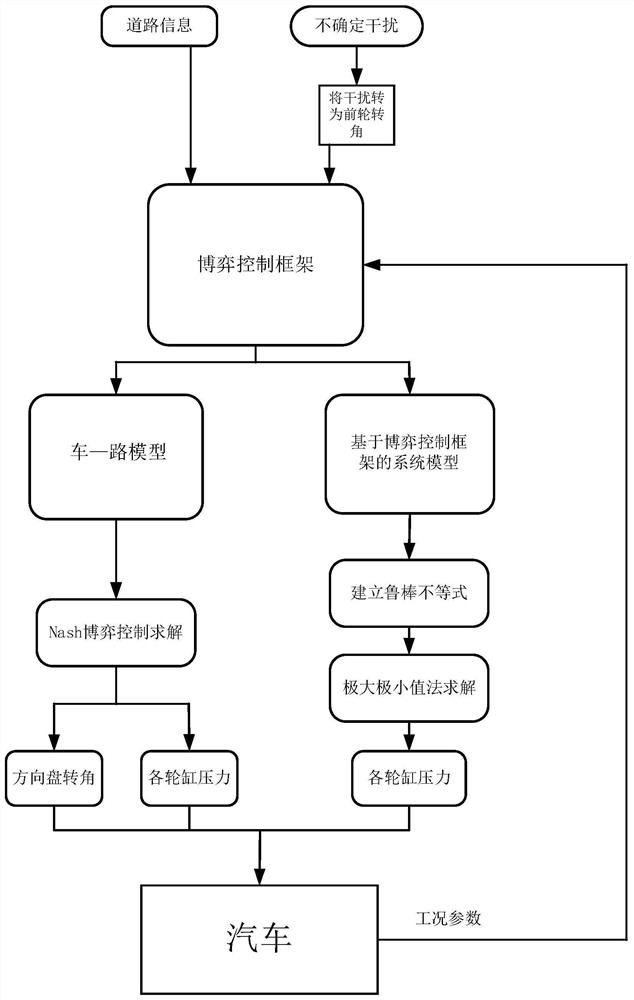
[0134] The Nash game control method for automatic driving, steering and braking under emergency avoidance conditions is shown in Figure 1, and includes the following steps:
[0135] Step 1) Construct a two-degree-of-freedom vehicle model according to the parameters of the experimental car, and discretize it;
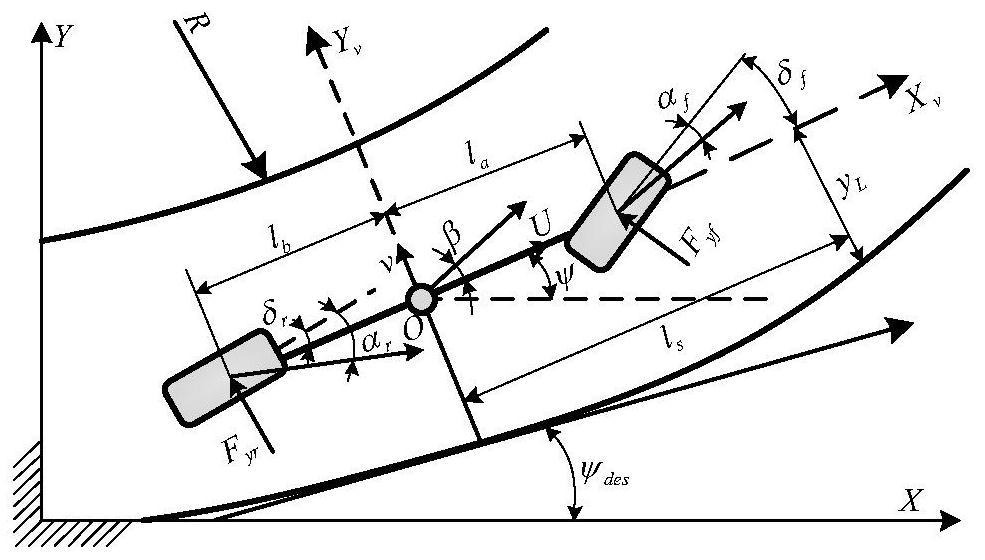
[0136] see figure 2 It can be seen that, in order to simplify the problem, the motion of the vehicle is represented by the lateral displacement and velocity of the vehicle's center of mass, as well as the yaw angle and yaw rate of the vehicle. The overall lateral displacement of the vehicle is obtained by integrating Equation (35):
[0137]
[0138] The yaw angle ψ of the vehicle at h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More