

Vision and laser radar fused outdoor mobile robot pose estimation method
A technology of mobile robot and laser radar, which is applied in the fields of instrumentation, calculation, image data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0086] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
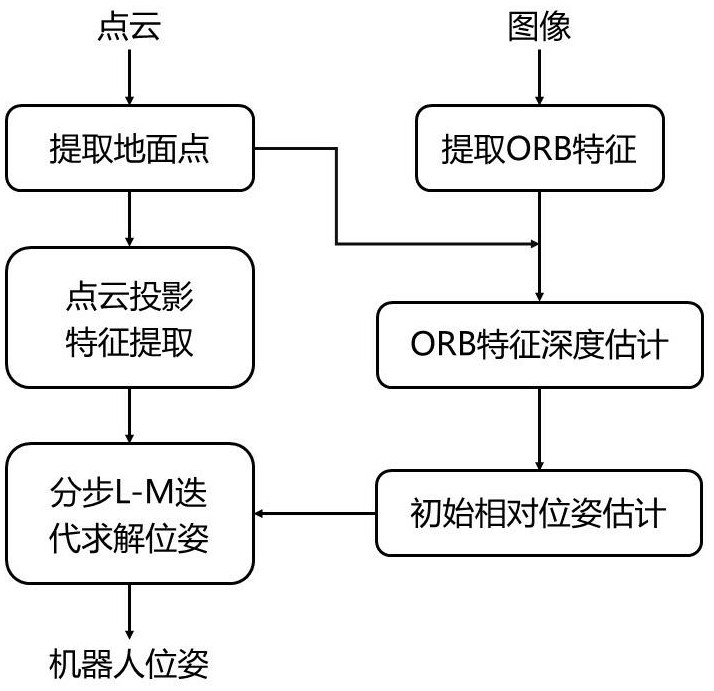
[0087] Please refer to figure 1 , the present invention provides a method for estimating the pose of an outdoor mobile robot that combines vision and laser radar, comprising the following steps:
[0088] Step S1: obtain point cloud data and visual image data;
[0089] Step S2: adopt the algorithm of iterative fitting to accurately estimate the ground model of the point cloud of each frame and extract the ground point;
[0090] Step S3: extract the ORB feature point to the lower half region of the visual image, and estimate the depth for the corresponding visual feature point according to the extracted ground point;
[0091] Step S4: according to the number of lines and the angular resolution of the laser radar, obtain the depth image formed by the depth information of the point cloud;
[0092] Step S5: according to the obtained depth image, calculate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More