

A Pose Estimation Method for Mobile Platform Based on Indirect Kalman Filter
A Kalman filter and Kalman filter technology, applied in the field of mobile platform pose estimation, can solve the problems of unfavorable fusion of various sensor data, affecting calculation simplification and accuracy, and complex filtering equations, etc., to achieve fast calculation and accurate calculation results The effect of improving and simplifying the calculation formula
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0084] The technical solutions in the embodiments of the present invention will be clearly and completely described and discussed below in conjunction with the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all examples. Based on the present invention All other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
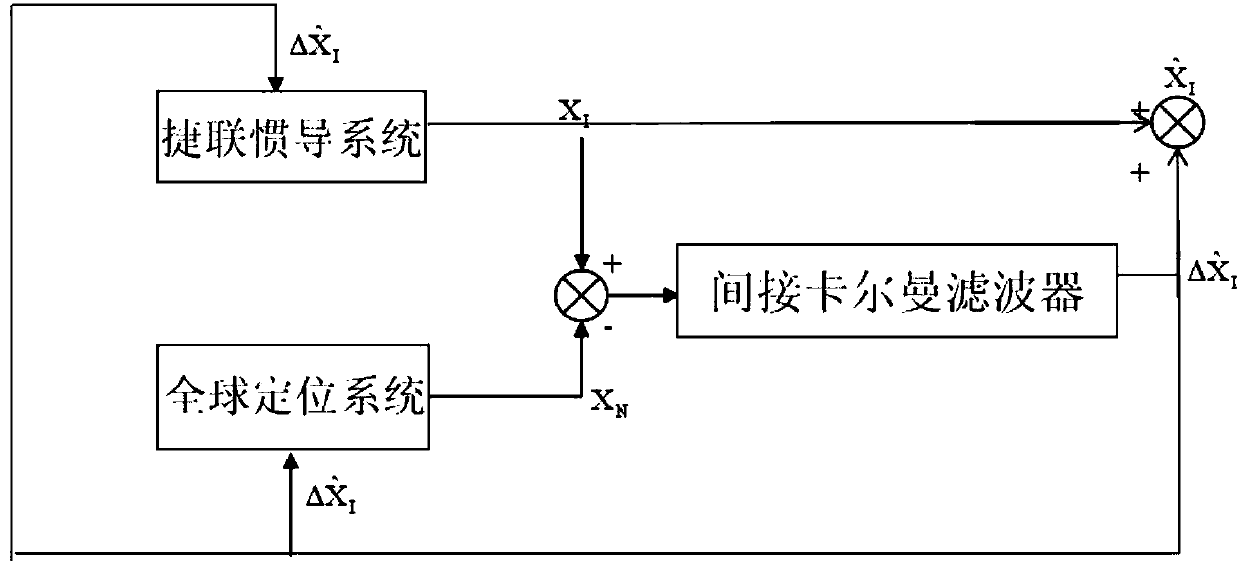
[0085] Such as figure 1 Shown is a schematic diagram of the overall framework of the system, and the estimated value of the strapdown inertial navigation system is X I , the observation data of the GPS is X N , the difference between the two is used as the observation input of the indirect Kalman filter, the indirect Kalman filter internally constructs the prediction equation, and the filter output is the estimated value of the error Part of the parameter feedback in this output...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More