

Radial telescopic wheel mechanism capable of adapting to stair steps with different heights
A technology that adapts to different heights. It is applied in the directions of wheels, vehicle parts, transportation and packaging, etc. It can solve the problems of unsafe stair cleaning robots, inability to adapt to stair steps, robot slippage, etc., and achieve the effect of stable and flexible plane movement control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing, preferred embodiment of the present invention is described:
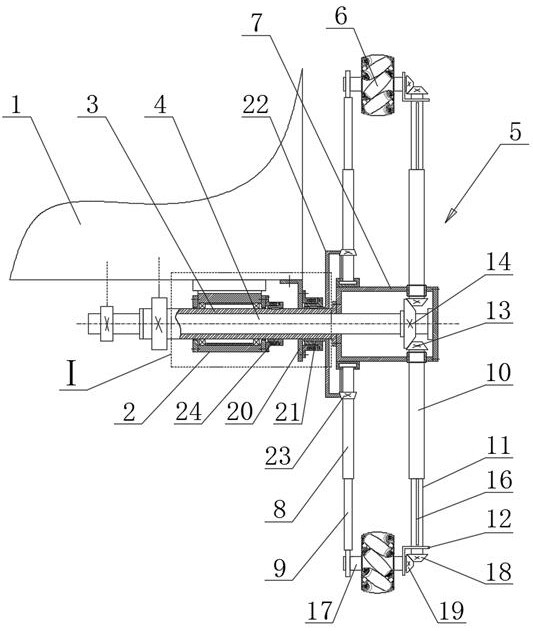
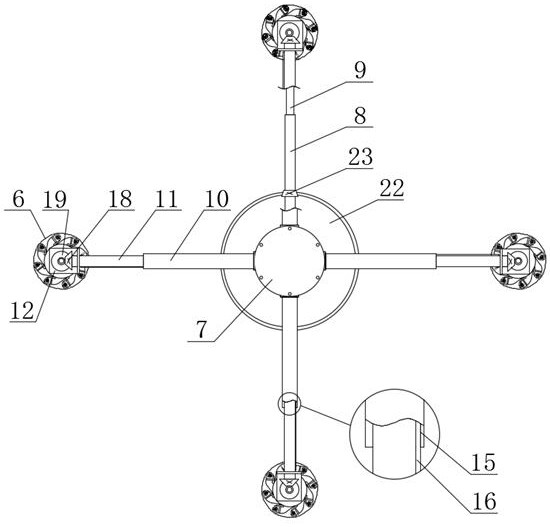
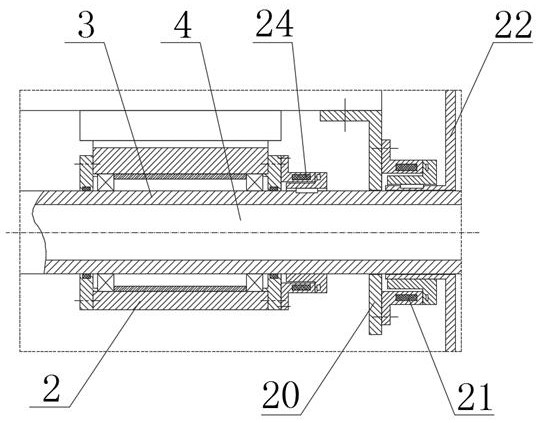
[0030] Such as Figures 1 to 3 As shown, a radially telescopic wheel mechanism that can adapt to stair steps of different heights; it includes a car body connecting seat 2, a drive combination shaft, a radially telescopic four-corner wheel and a telescopic adjustment assembly; the car body connecting seat 2 is used for connecting with the vehicle The frame body 1 is connected to provide support for the drive combination shaft; the drive combination shaft is used to drive the radially telescopic square wheel; the telescopic adjustment assembly is used to regulate the telescopic function and the rotation function of the radially telescopic square wheel.
[0031] in:
[0032] The vehicle body connecting seat 2 is connected to the chassis or side wall of the vehicle frame body 1 , and the vehicle body connecting seat 2 is a bearing seat and provides support for the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More