Method and system for extracting road outer side line based on projection drawing
A projection map, road technology, applied in image data processing, instruments, 3D modeling, etc., can solve the problem of long time, and achieve the effect of increasing the production time and reducing the extraction time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] Embodiment 1 provided by the present invention is an embodiment of a method for extracting road outer lines based on a projection map provided by the present invention, and this embodiment includes:
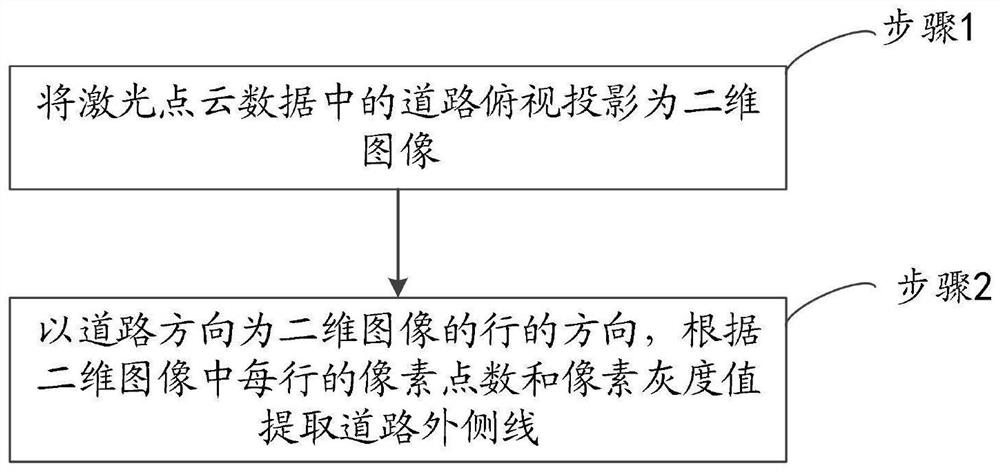
[0045] Step 1. Project the top view of the road in the laser point cloud data into a two-dimensional image.
[0046] Step 2, taking the direction of the road as the row direction of the two-dimensional image, and extracting the outer line of the road according to the number of pixels and the gray value of each row in the two-dimensional image.
[0047] Preferably, step 2 includes:
[0048] Step 201: Count the mean value of the number of pixels and the mean value of the pixel grayscale value of each row in the middle area of the two-dimensional image, and determine the rough position of the outer line of the road according to the mean value of the number of pixels and the mean value of the grayscale value of the pixel.
[0049] Further, step 201 includes:
[0050] Step ...
Embodiment 2
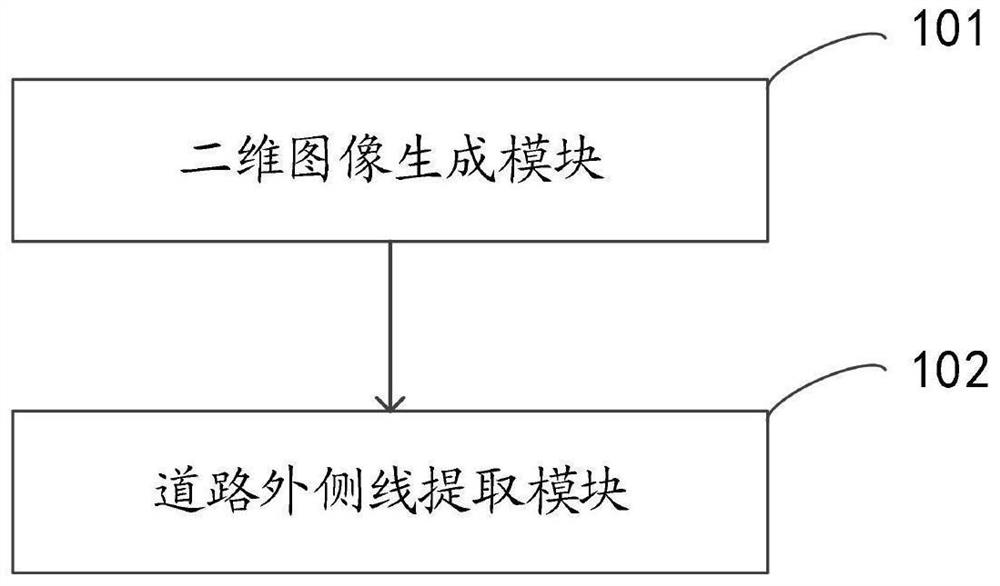
[0071] Embodiment 2 provided by the present invention is an embodiment of a system for extracting road outer lines based on projection maps provided by the present invention, such as figure 2 Shown is a structural block diagram of an embodiment of a system for extracting road outer lines based on projection maps provided by the present invention, consisting of figure 2 It can be seen that the system includes: a two-dimensional image generation module 101 and a road outside line extraction module 102 .
[0072] The two-dimensional image generating module 101 is configured to project the top view of the road in the laser point cloud data into a two-dimensional image.
[0073] The road outer line extraction module 102 is configured to use the road direction as the row direction of the two-dimensional image, and extract the road outer line according to the number of pixels and the pixel gray value of each row in the two-dimensional image.
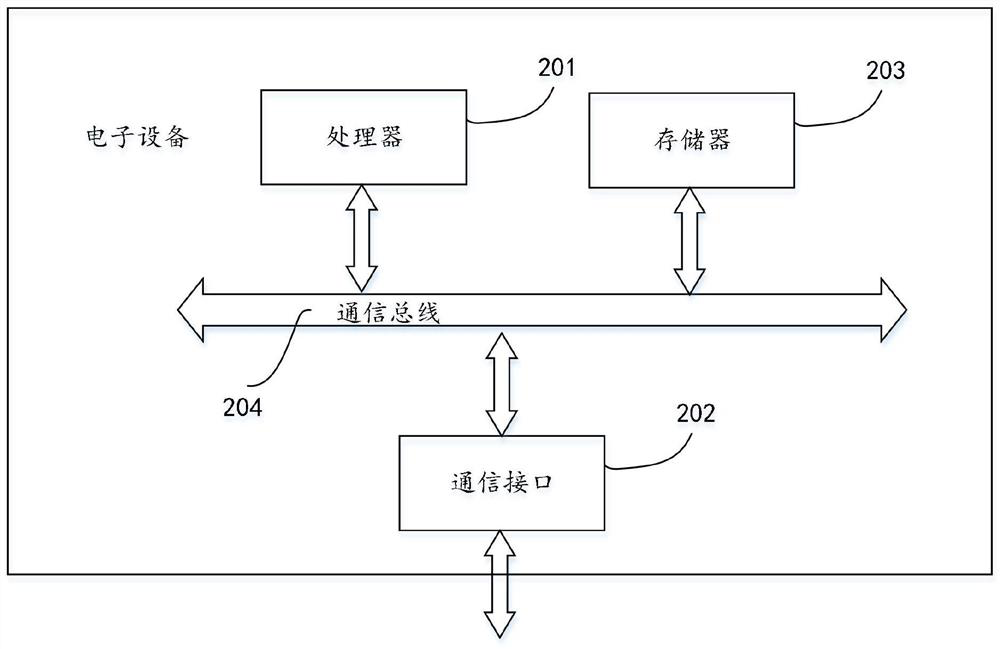
[0074] image 3 A schematic diagram ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More