Hierarchical clustering network topology generation method based on multi-task UAV swarm information interaction
A network topology and information interaction technology, applied in the field of network topology generation, can solve the problems of limited cluster size, formation maintenance, information interaction for a single task, etc., and achieve the effect of improving computing efficiency and performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
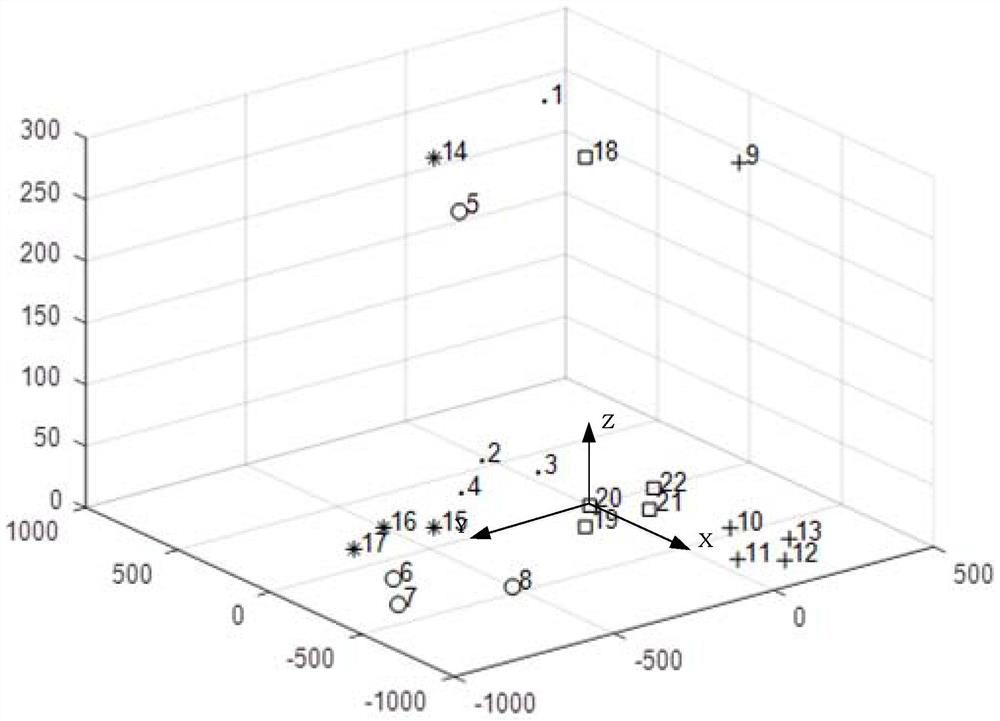
[0175] (A) Assuming that a UAV cluster formation is composed of 22 UAVs, the set of UAVs marked with numbers is The communication range of each drone is 1600m without failure.
[0176] (B) Select the formation reference point, the unmanned aerial vehicle UAV numbered 20 20 As the formation reference point, the formation reference point UAV after assignment 20 The location of the UAV 20 (0,0,0).
[0177] (C) Tasks, tasks include target detection, information fusion, integrated navigation, fire attack and search and lock.
[0178] (D) All UAVs are classified into the same cluster based on performing the same mission.
[0179] The cluster responsible for the target detection task is denoted as C 1 , the cluster responsible for the information fusion task is denoted as C 2 , the cluster responsible for the integrated navigation task is denoted as C 3 , the cluster responsible for the fire attack task is denoted as C 4 , The cluster responsible for the search and lock task...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com