

Moving workpiece automatic spraying robot system based on machine vision and working method
A spraying robot and robot system technology, which is applied in the field of automatic spraying robot system for moving workpieces, can solve the problems of manual or mechanical correction, keeping it at a certain angle and posture, unable to spray normally, and unable to deal with excessive workpiece size, etc., to achieve Improve the environmental protection level of the enterprise, reduce the cost of human resources, and improve the effect of social and economic benefits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
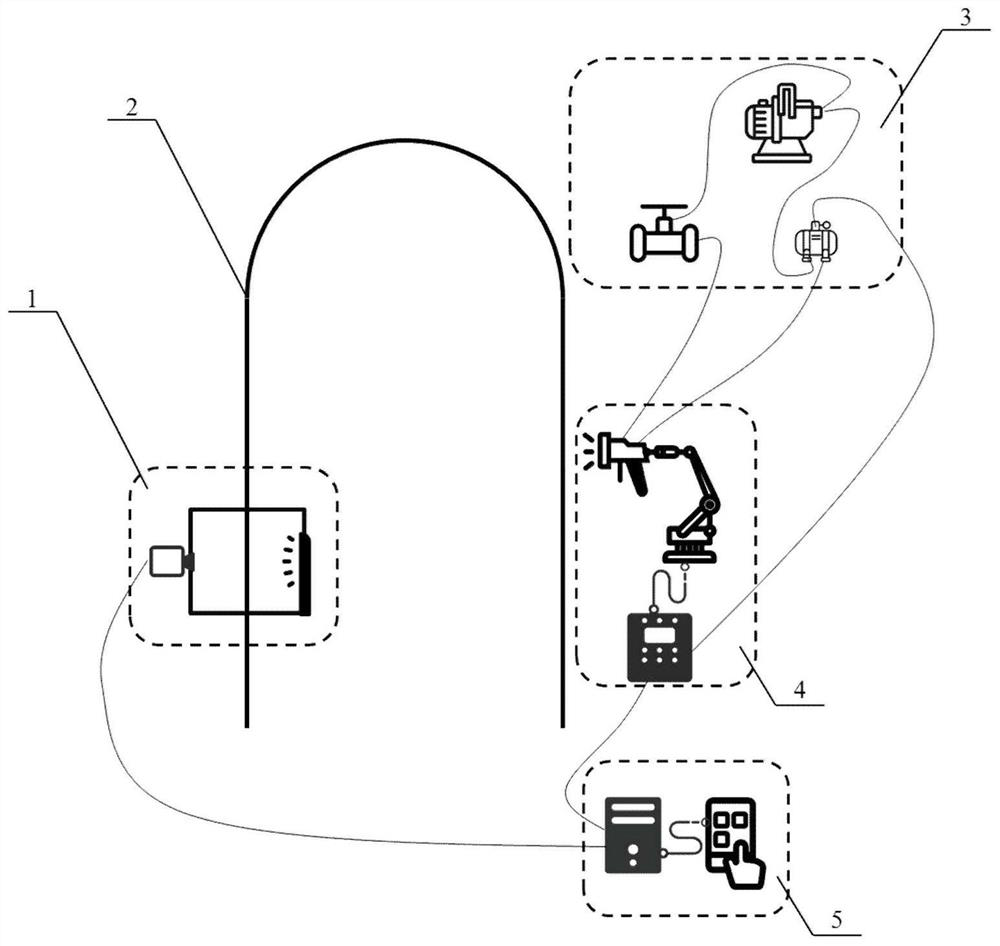
[0049] Such as figure 1 As shown, it is a structural schematic diagram of a robot system for automatic spraying of moving workpieces based on machine vision in the present invention. The system includes: surface light source visual acquisition equipment 1, self-rotating hook guide rail 2, parameter-controllable air pressure paint supply system 3, spraying robot 4 and visual human-computer interaction equipment 5.
[0050] Specifically, the surface light source vis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More