Underwater robot motion control method based on Actor-Critic algorithm
A technology of robot movement and underwater robot, applied in the direction of non-electric variable control, control/adjustment system, height or depth control, etc., can solve the problems of low precision of underwater robot speed and attitude control, real-time adjustment parameters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
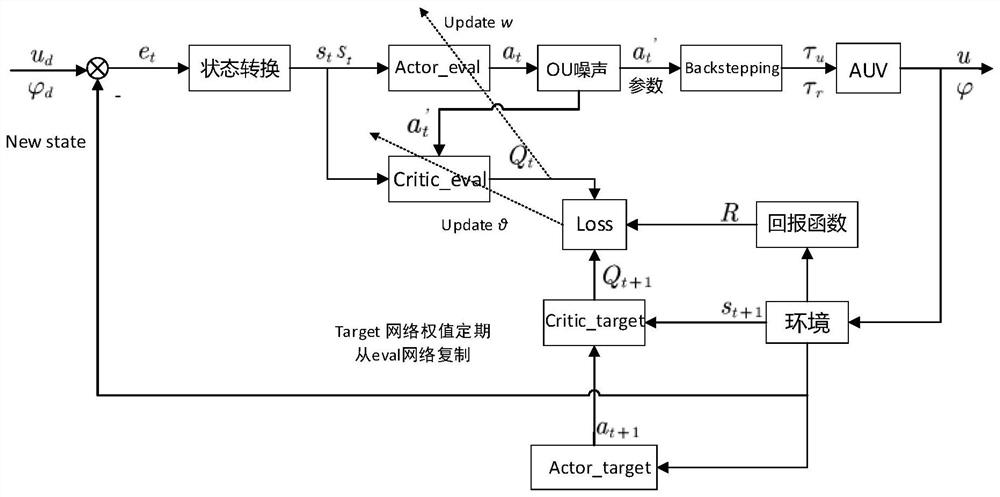
[0017] Specific implementation mode one: the present implementation mode is a kind of underwater robot motion control method based on Actor-Critic algorithm, and specific process is:
[0018] Step 1. Initialize parameters;
[0019] Step 2. Design the speed control system and the heading control system of the underwater robot respectively based on the backstepping method, and then determine the control law of the speed control system and the control law of the heading control system according to the designed speed control system and heading control system;
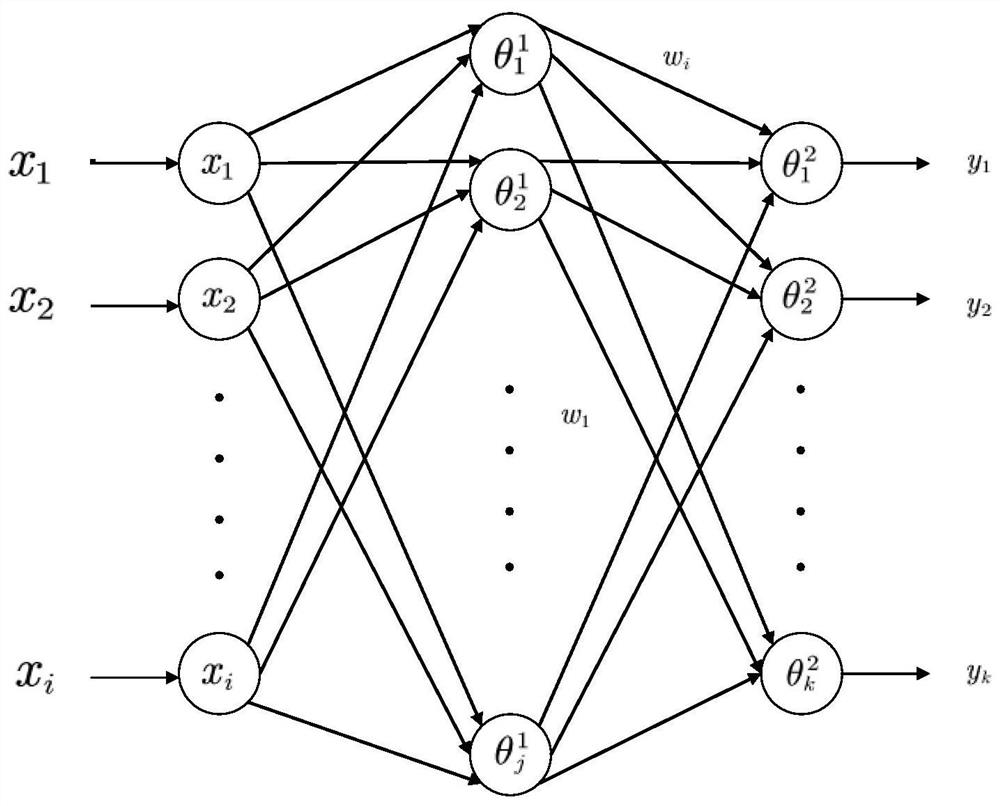
[0020] Step 3. Set the Actor-Critic neural network. The Actor-Critic neural network includes four RBF neural networks, which are Actor current network, Actor target network, Critic current network and Critic target network;
[0021] Step 4. Determine the input and output of the Actor's current network; determine the input and output of the Critic's current network;
[0022] Step 5. Determine the input and output of the Act...
specific Embodiment approach 2
[0027] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the initialization parameters in the step one; specifically:
[0028] Initialize the neural network parameters θ and w as random numbers of [-1,1], and set the neural network update weights α, discount rate γ, ε; initialize the original controller parameters ku0, Kr10 and Kr20; initialize the AUV model parameter quality m , a dimensionless hydrodynamic parameter x u|u| , N r , N r|r| , the moment of inertia I of the underwater robot around the z-axis of the motion coordinate system z .
[0029] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0030] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that in the step two, the speed control system and the heading control system of the underwater robot are respectively designed based on the backstepping method, and then according to the designed speed control system And the heading control system determines the control law of the speed control system and the control law of the heading control system; the specific process is:
[0031] In order to use the parameter adaptive backstepping controller based on the Actor-Critic algorithm to realize the trajectory tracking control of the AUV, the goal of the present invention is to design the controller u so that the speed v and attitude of the AUV system in the presence of ocean current interference The quantity η is still able to track the expected value v d , η d and make the tracking error e v =v-v d 、e η =η-η d There are predetermined dynamic performance and stead...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com