

Search method and online control method for current trajectory of permanent magnet synchronous motor mtpa control
A permanent magnet synchronous motor, current control technology, applied in motor control, motor generator control, control of electromechanical brakes, etc., can solve problems such as large current trajectory deviation, inability to achieve maximum torque-current ratio control, and achieve a small amount of calculation. , Accurate maximum torque current ratio control, the effect of improving running performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
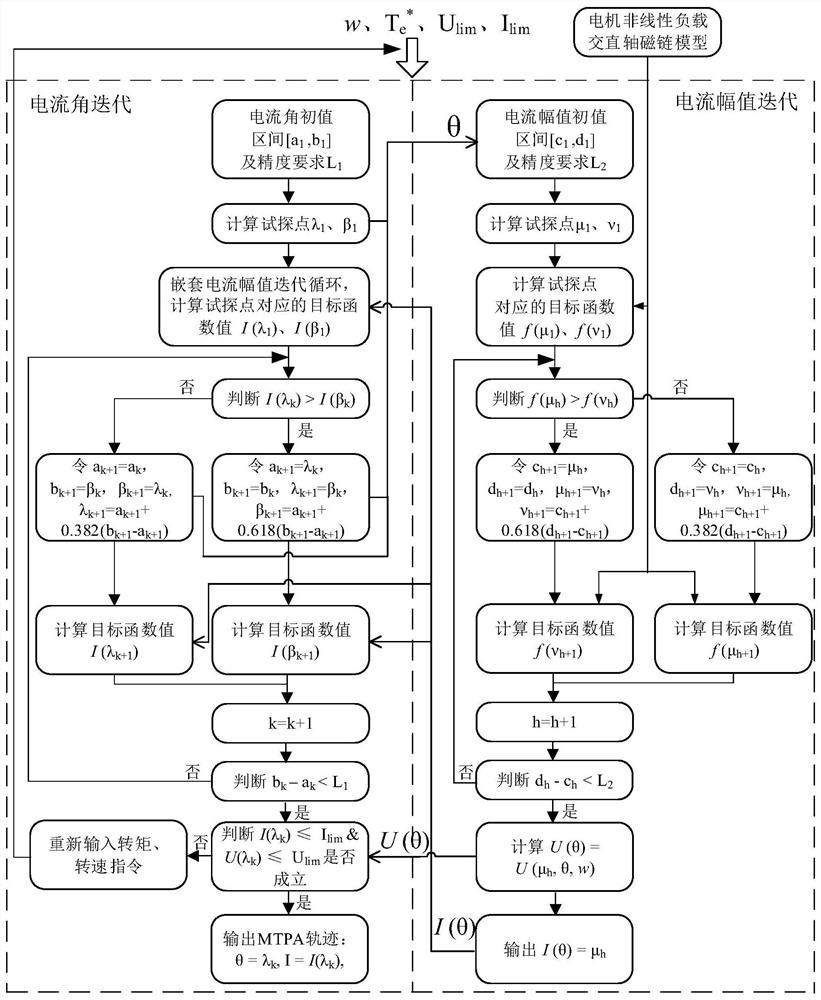
[0063] Specific embodiment one: the following combination Figure 1 to Figure 4 This embodiment will be described. The method for searching the current trajectory of a permanent magnet synchronous motor MTPA control described in this embodiment includes a current angle iteration loop step and a current amplitude iteration loop step. See figure 2 shown, the objective function value I(λ in the iteration loop step of the current angle k ) and I(β k ) is obtained by calling the current amplitude iterative loop, k=1,2,3...that is, the objective function value that needs to be obtained by calling the current amplitude iterative loop is I(λ 1 ), I(β 1 ); I(λ 2 ), I(β 2 ); I(λ 3 ), I(β 3 )…, the parameter output to the current amplitude iteration loop is the current angle test point λ k , β k , when k=1, θ=λ 1 and beta 1 Two values, need to perform two iterations of current amplitude, when k=2, 3..., θ=λ k or beta k , perform an iterative cycle of current amplitude, and o...
specific Embodiment approach 2
[0138] Specific embodiment two: the following combination Figure 1 to Figure 5 This embodiment will be described, and the MTPA online control method of the permanent magnet synchronous motor described in this embodiment will be described.
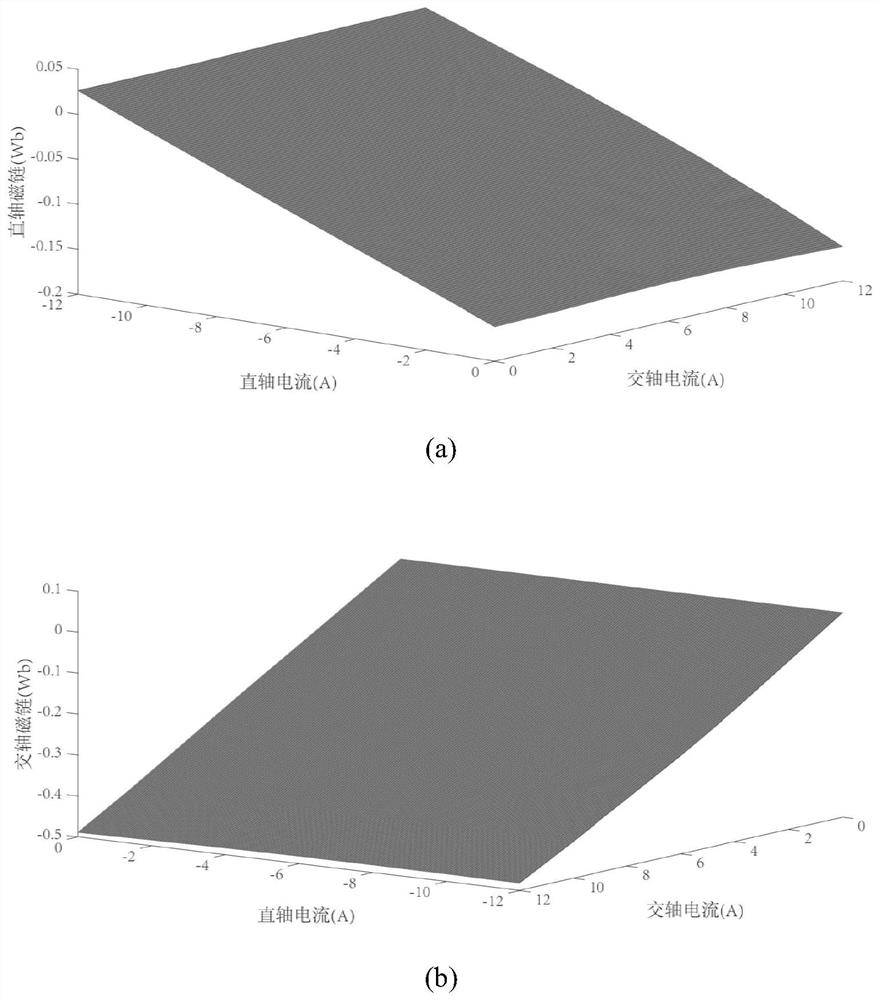
[0139] The search method described in Embodiment 1 is used to obtain the current trajectories of the permanent magnet synchronous motor at a series of operating points under different magnetization states, and these current trajectories are used as sample data to train, test and verify the neural network model. The input of the MTPA neural network model is the speed, torque, voltage limit and current limit of the motor, and the output is the current amplitude and current angle (or the direct-axis current and the quadrature-axis current). The gradient of the error between the values adjusts the weight and bias of each node along the reverse direction of the neural network calculation. During the training process of each sample, the weight...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More