

Hand-eye system calibration method, device and equipment
A calibration method and hand-eye technology, applied in the field of computer vision, can solve problems such as complex operation process and low efficiency, and achieve the effects of improving calibration efficiency, avoiding repeated disassembly, and reducing the probability of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Exemplary embodiments will be described in detail herein, examples of which are illustrated in the accompanying drawings. Where the following description refers to the drawings, the same numerals in different drawings refer to the same or similar elements unless otherwise indicated. The implementations described in the illustrative examples below are not intended to represent all implementations consistent with this application. Rather, they are merely examples of apparatus and methods consistent with some aspects of the present application as recited in the appended claims.
[0068] First, the terms involved in the embodiments of the present application are explained:
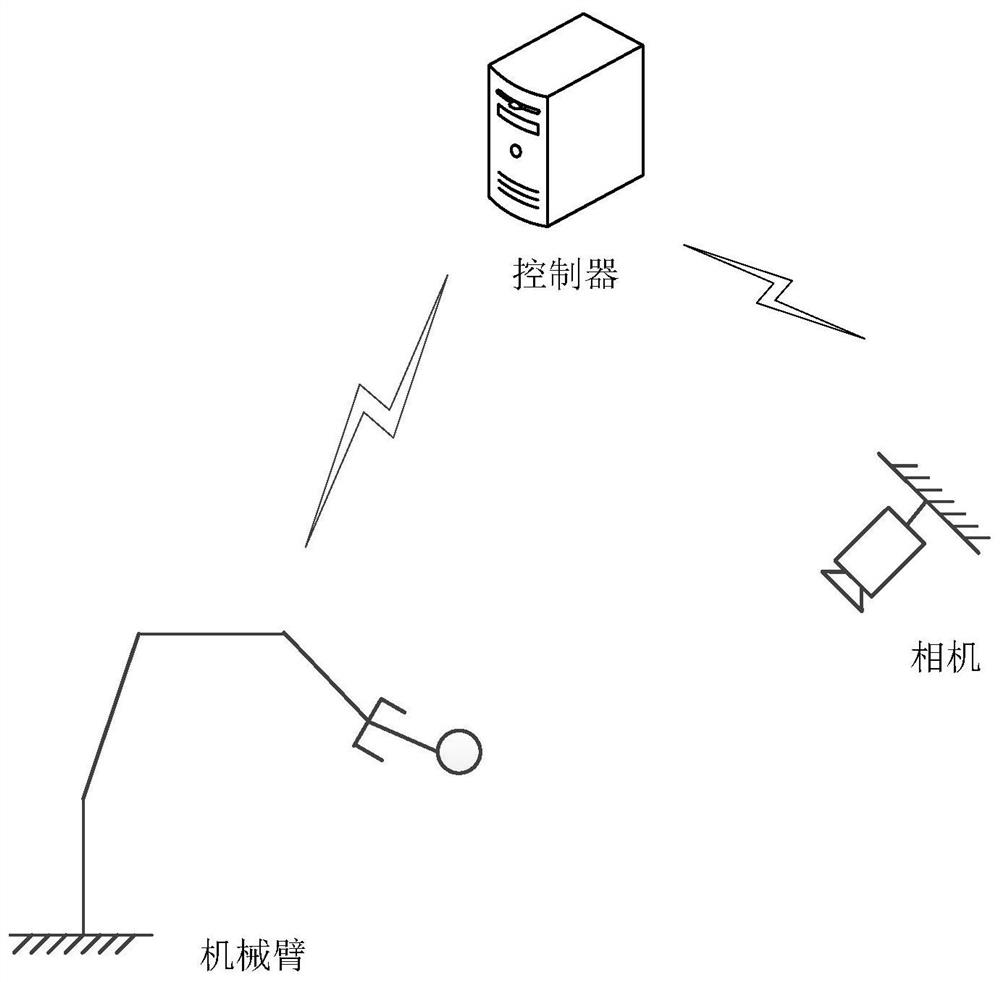
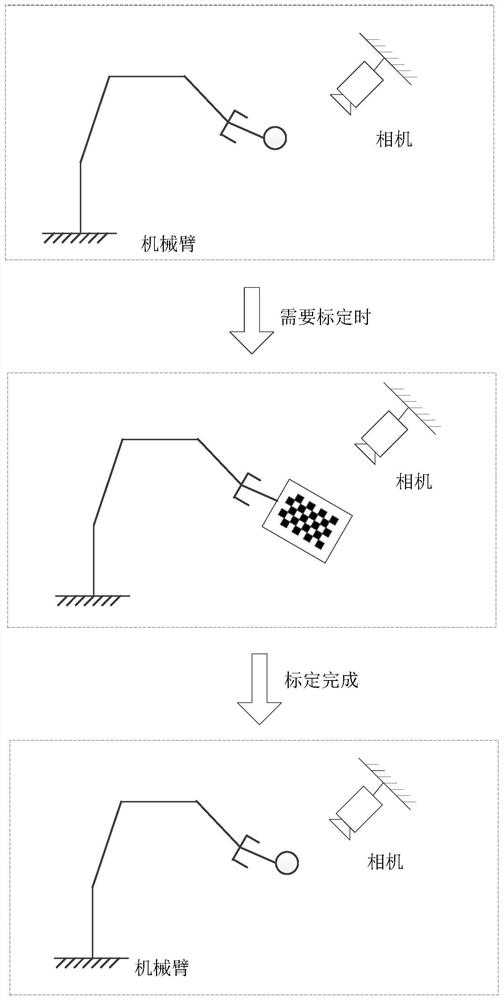
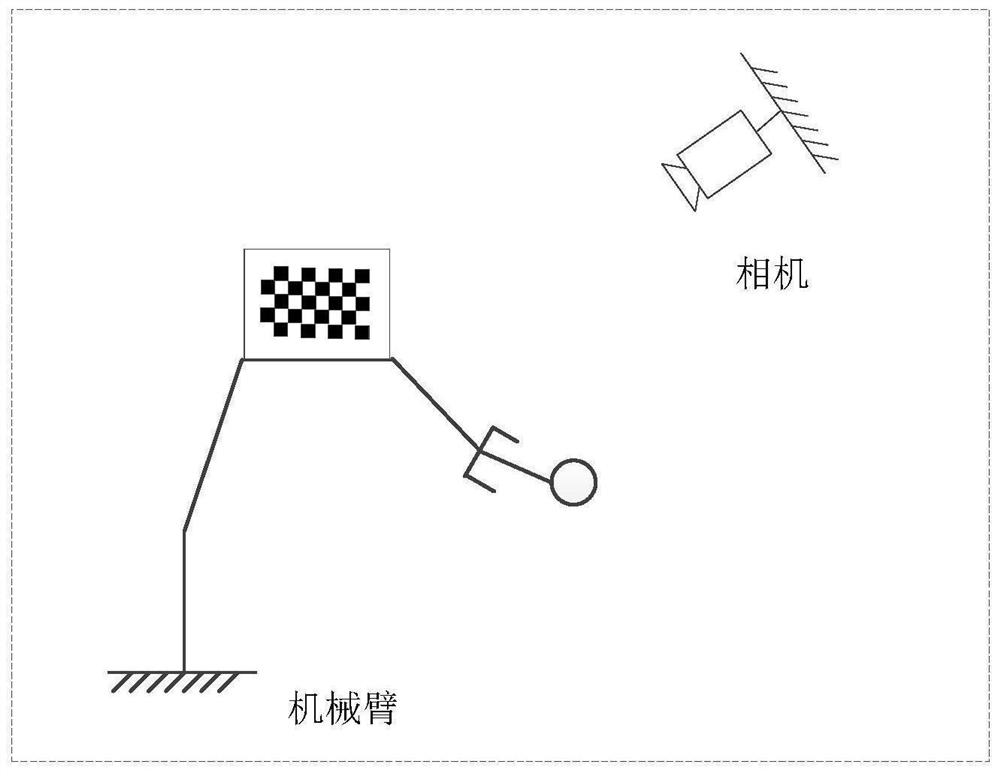
[0069] Hand-eye calibration: When the end of the manipulator is in different poses, the external parameters of the camera relative to the calibration board are calibrated. According to the external parameters of the camera relative to the calibration board and the pose of the end of the manipulator, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More