

Motion control method of manned submersible
A manned submersible, motion control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of waste of resources, poor robustness, and inability to meet the needs of use, and achieve the goal of reducing energy consumption. Consumption, improve the effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not as limitations of the present invention.
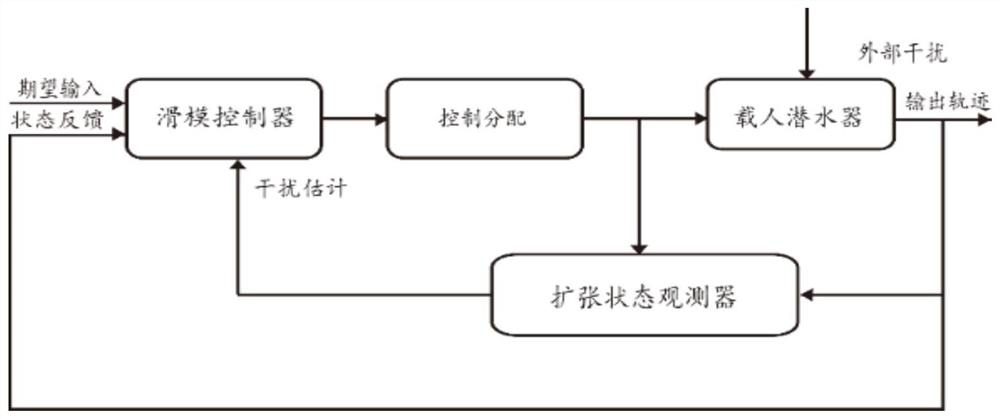
[0048] refer to figure 1 , the present embodiment discloses a motion control method of a manned submersible, comprising the following steps:
[0049] 1) Establish the dynamic model of the manned submersible according to the position information, attitude information and composite interference information of the manned submersible;
[0050] 2) Simplify the dynamic model of the manned submersible; build an extended state observer, and use the extended state observer to obtain the estimated value of the composite interference information;
[0051] 3) The sliding mode controller is designed using the full-order non-singular terminal sliding mode;
[0052] 4) The thrust of the manned submersible is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More