

A smart vehicle trajectory tracking controller based on robust model predictive control and its construction method
A technology of model predictive control and predictive controller, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the controlled object of the dynamic model does not match, the robustness cannot be guaranteed, and the slope of the road surface is not good. Problems such as flatness interference, to achieve the effect of simplifying the tire dynamics model, improving the calculation speed, and ensuring real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention is further described below in conjunction with the accompanying drawings.
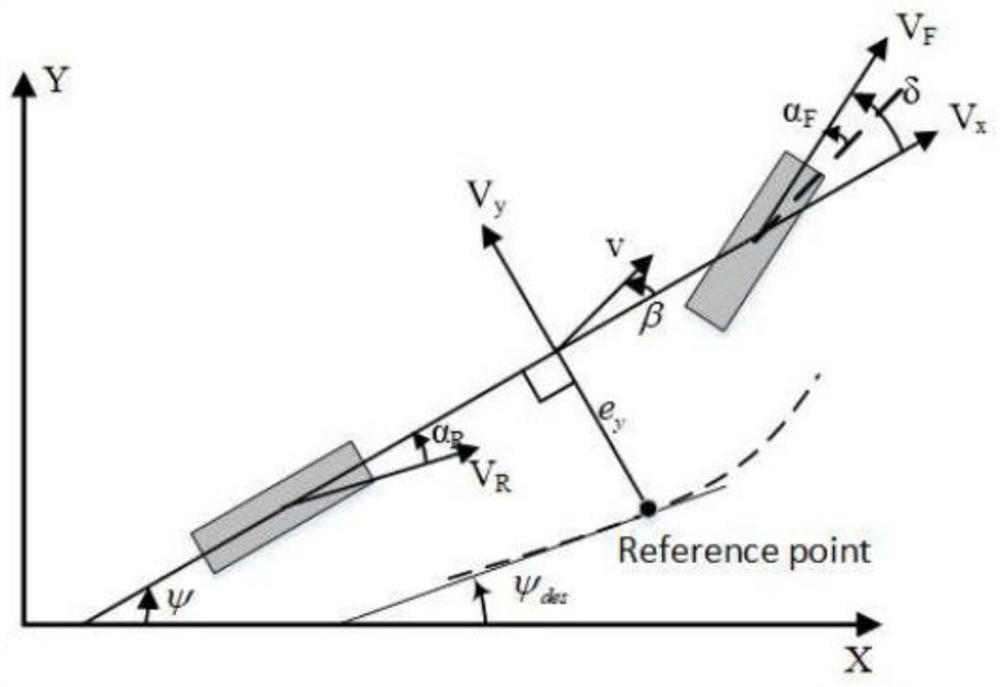
[0017] as Figure 1 As shown, the intelligent car dynamics are simplified, and the path tracking error model is established in both directions and the horizontal and horizontal directions:
[0018]
[0019] thereinto is the state variable, δ is the front wheel angle,
[0020]
[0021]
[0022] Where m is the vehicle mass, I z The moment of inertia of the vehicle around the Z axis, C f ,C r Side deviation stiffness of the front and rear wheels, respectively, l f ,l r The distance from the center of mass of the vehicle to the front and rear axles, respectively, V x is longitudinal velocity, e y is the lateral deviation of the car's current position from the centerline of the lane, e ψ For the deviation of the current heading angle of the vehicle from the direction angle of the lane centerline, the δ is the control quantity front wheel angle, and the ψ des for the desired hea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More