

A distributed drive unmanned vehicle path tracking control method and system
A technology of path tracking and unmanned vehicles, which is applied in vehicle position/route/height control, control/regulation system, non-electric variable control, etc., and can solve the problems of inability to ensure ideal curvature tracking, path tracking control control accuracy reduction, errors, etc. problem, to achieve the effect of high closed-loop response bandwidth, enhanced transverse open-loop gain, and easy engineering implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
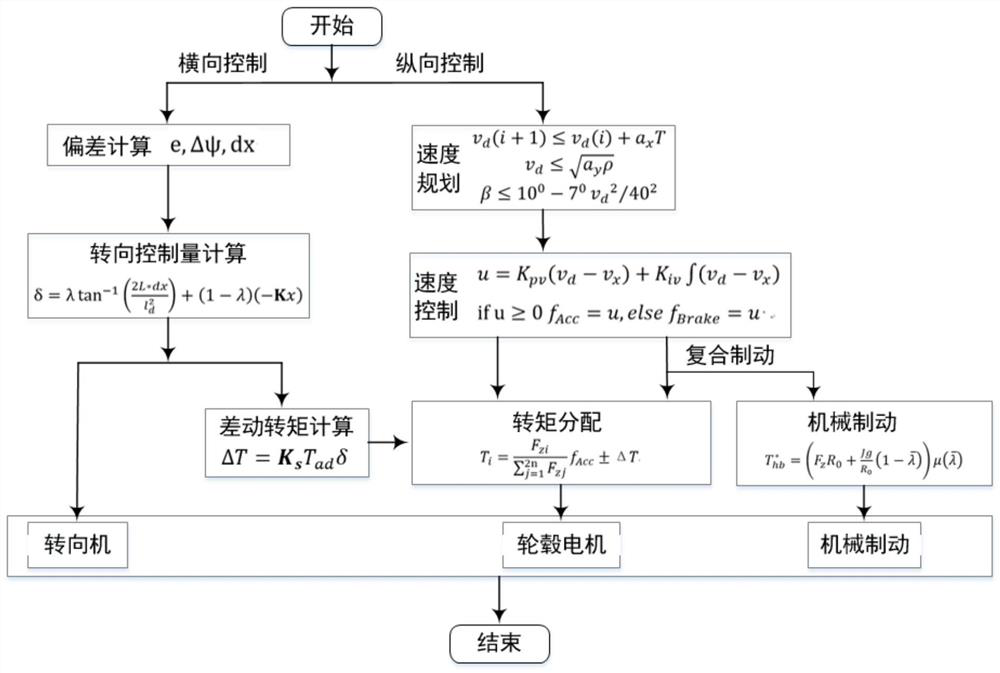
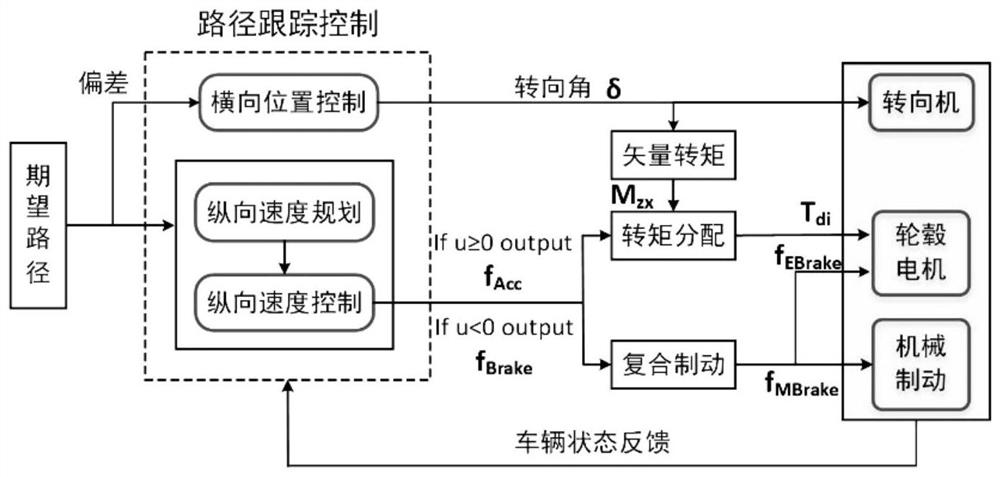
[0102] On the basis of the above-mentioned embodiment 1, in order to realize the above-mentioned control, a control system including a path-tracking deviation modeling module, a path-tracking control module, a combined feedback control module and a compound steering matching module is designed.
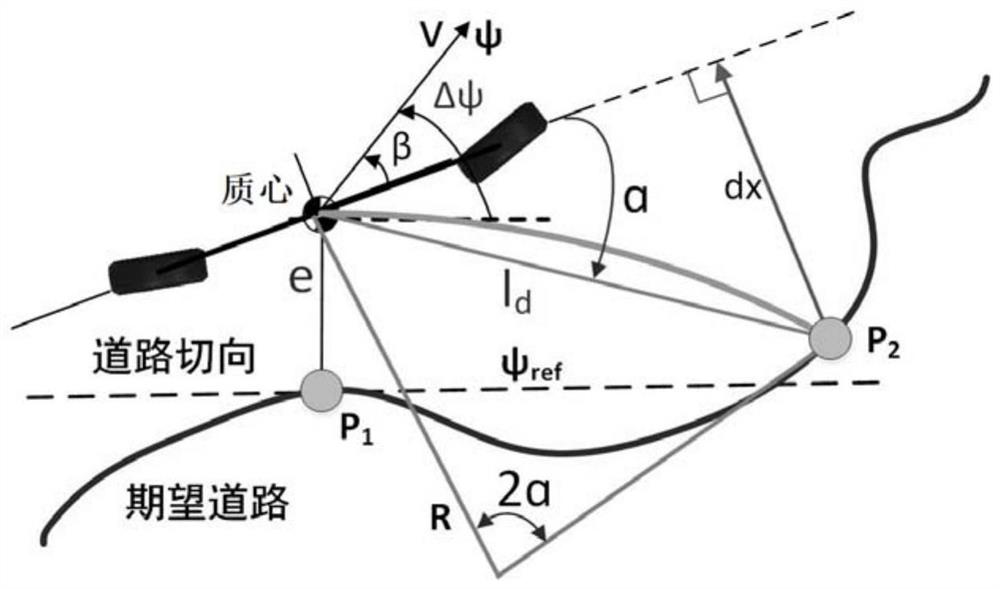
[0103] The path tracking deviation modeling module is used to calculate the lateral position deviation and heading angle deviation according to the expected path tracking point and the current center of mass position of the vehicle, so as to realize lateral position control;
[0104] The path tracking control module performs path tracking control according to the state information fed back by the vehicle, including receiving the state information fed back by the vehicle (including the actual longitudinal speed of the vehicle), and performing path tracking longitudinal speed planning (that is, calculating the expected speed v d ), calculate the path tracking longitudinal control amount ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More