

Robot behavior teaching method based on meta-learning
A teaching method and robot technology, applied in machine learning, teaching aids and instruments operated by electricity, can solve problems such as algorithm performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
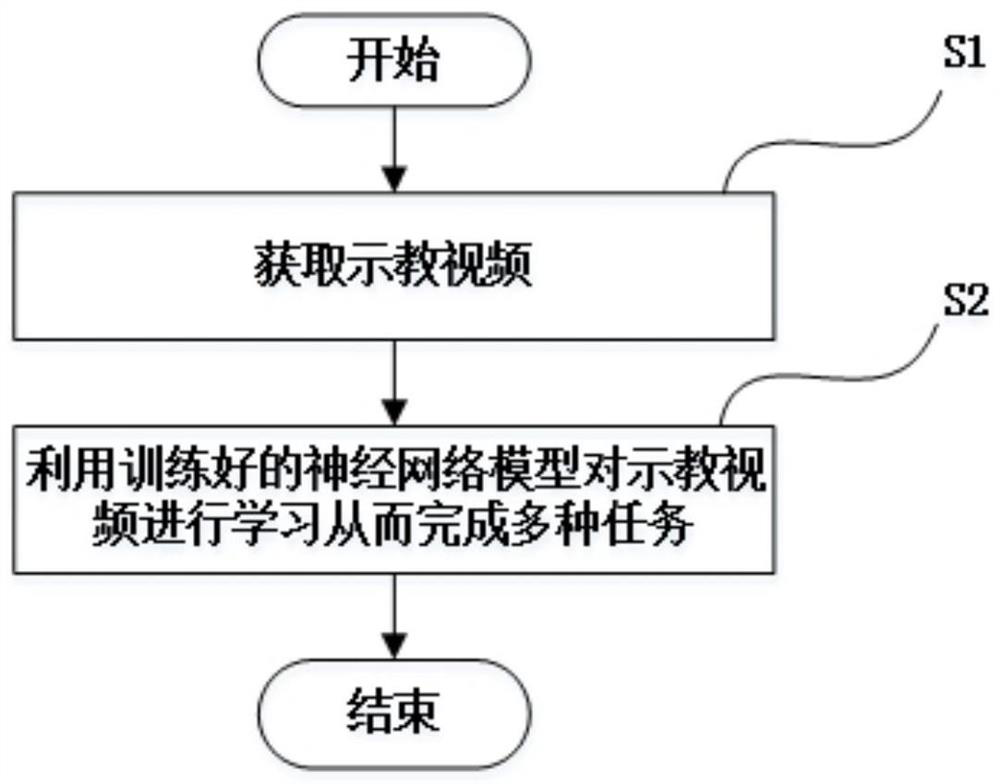
[0039] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, a meta-learning-based robot behavior teaching method of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
[0040]
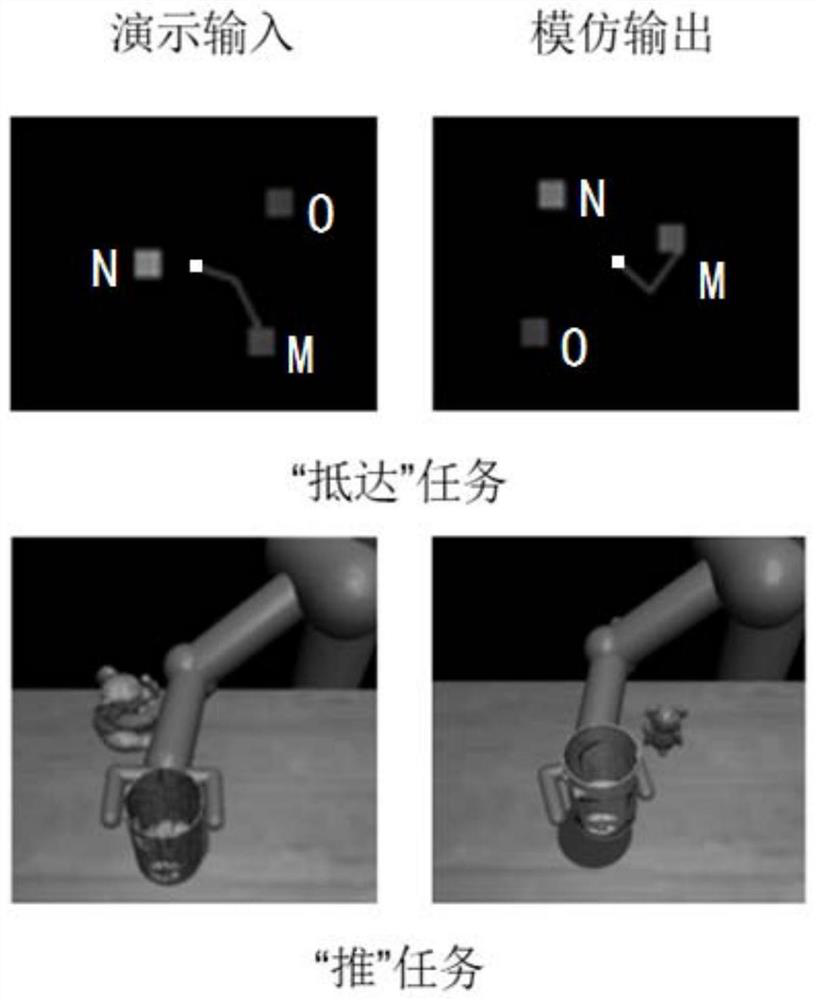
[0041] The robot behavior teaching method based on meta-learning in this embodiment is specifically completed on the UR10 robot. A camera is placed on the workbench of the UR10 robot, and the camera is connected to a computer for visual information feedback. At the same time, a table is placed in front of the workbench, and objects of various shapes are placed on the table so that the robot can perform tasks such as reaching, picking up, putting down, and pushing the above objects.
[0042] The preprocessing teaching video in the robot behavior teaching method based on meta-learning in this embodiment is mainly based on object sorting, mainly based on the inpu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More