Unlock instant, AI-driven research and patent intelligence for your innovation.
High-order attitude enhancement method based on angular rate input
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A technology of angular rate and attitude, applied in the field of strapdown inertial navigation attitude calculation, can solve the problem of low navigation accuracy
Active Publication Date: 2021-03-19
SOUTHEAST UNIV
View PDF2 Cites 1 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0037] The purpose of the present invention is to solve the problem that the traditional angle rate input cone error compensation algorithm is limited by the number of samples in the attitude update period and ignores the influence of the tricross product term, which leads to the low navigation accuracy of the attitude algorithm in a high dynamic environment, and provides A high-order enhanced attitude method based on angular rate input, which can effectively reduce the cone error in the attitude algorithm without increasing the sampling frequency and attitude update frequency
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
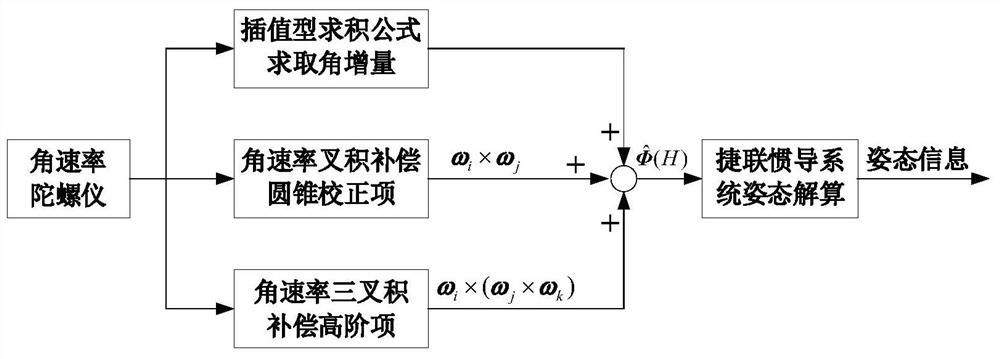
[0084] Such as figure 1 As shown, the present invention provides a high-order enhanced attitude algorithm based on angular rate input.
[0085] Specific steps are as follows:
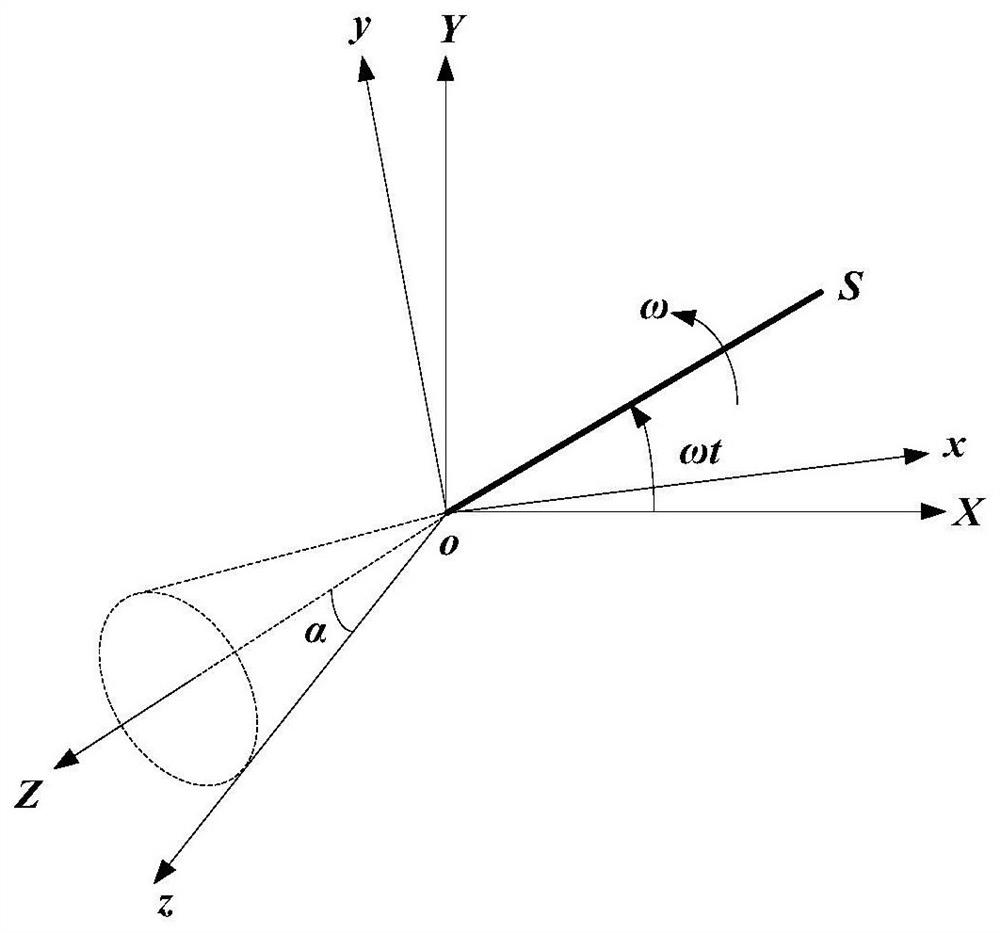
[0086] First, the theoretical value of the rotation vector in one attitude update cycle is derived under typical coning motion;
[0087] When the carrier performs a typical conical motion relative to the navigation coordinate system, the corresponding quaternion is shown in formula (19):
[0088]
[0089] Where ω is the angular frequency of the cone motion, and α is the half-cone angle of the cone motion. At this time, the projection of the carrier angular velocity vector ω(t) in the carrier coordinate system is:
[0090]
[0091] Then the z-axis theoretical value of the second-order rotation vector term δΦ cz (H) is:
[0092]
[0093] Z-axis theoretical value δΦ of the third-order rotation vector term Az and δΦ Bz They are:
[0094]
[0095] δΦ Bz =0 (25)
[0096] Due to δΦ Bz is...
Embodiment 2
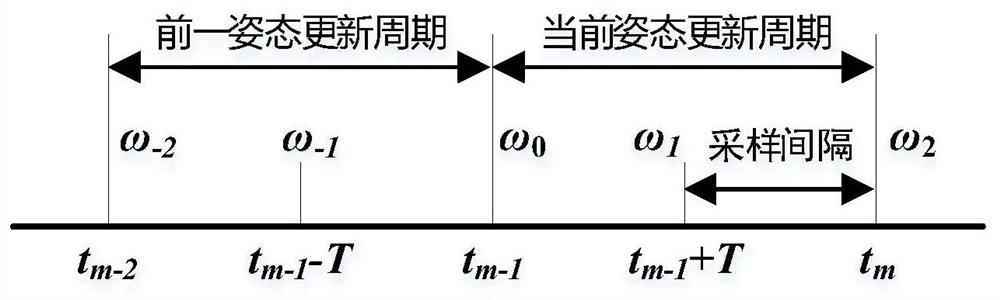
[0137] In this embodiment, it is assumed that the gyroscope performs 2 samplings in one attitude update cycle (such as figure 2 shown), the specific steps are:
[0138] Step 1. In an attitude update cycle, sample the output of the gyroscope twice to obtain the angular velocity of the carrier motion ω 1 , ω 2 , and extract and store the angular rate ω in the last attitude update period in the computer -2 , ω -1 , ω 0 .
[0139] Step 2. Use the Lagrangian interpolation integration method to integrate the 5 angular rates, then the estimated value of the gyroscope angle increment in one attitude update cycle for:
[0140]
[0141] Step 3. Using the angular rate information in the previous attitude update period and the current attitude update period, calculate the estimated value of the second-order rotation vector term in the current attitude update period
[0142]
[0143] Step 4. Using the angular rate information in the previous attitude update period and the ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a high-order attitude enhancement method based on angular rate input, and belongs to the field of strapdown inertial navigation. According to the method, angular rates in a previous attitude updating period and a current attitude updating period are utilized, firstly, Lagrange interpolation is carried out on the angular rates, integration is carried out in the current attitude updating period to estimate angular increment, and then a linear combination of angular rate binary products is utilized to estimate a second-order rotation vector term in a non-exchangeable error, and then, a third-order rotation vector item in the non-exchangeable error is estimated by utilizing a linear combination of angular rate ternary products, and finally a rotation vector in an attitude updating period with the obtained approximate values of the angular increment, the second-order rotation vector item and the third-order rotation vector item, so that the non-exchangeable error caused by rigid body rotation is effectively reduced; and the attitude calculation precision is further improved.
Description
technical field [0001] The invention relates to a high-order enhanced attitude method based on angular rate input, and belongs to the technical field of strapdown inertial navigation attitude calculation. Background technique [0002] In the strapdown inertial navigation system (Strapdown Inertial Navigation System, SINS), the gyroscope is directly fixed to the carrier, and is sensitive to the angular motion of the carrier relative to the inertial space. The performance of attitude algorithm directly affects the navigation accuracy of SINS. Due to the non-exchangeability of finite rotation, coning error is inevitably introduced into attitude calculation, especially in high dynamic environments. Savage believes that it is reasonable for the error of the navigation algorithm to be less than 5% of the error caused by the inertial device, so with the continuous development of the inertial device, the accuracy of the navigation algorithm also needs to be improved, so it is necess...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.

 Login to View More
Login to View More  Login to View More
Login to View More