

Automatic driving local path planning method and system
A technology for local path planning and automatic driving, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve the problems of few applications in the field of unmanned driving, inability to make planning behaviors, and inconsistent with unmanned driving strategies. Achieve the effect of avoiding infinite approaching obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The method and system for autonomous driving local path planning according to the present invention will be further explained and described in conjunction with the drawings and specific embodiments below. However, the explanation and description do not constitute an improper limitation on the technical solution of the present invention.
[0048] In the present invention, the present invention discloses a local path planning system for automatic driving, which can be used to implement the local path planning method for automatic driving of the present invention.
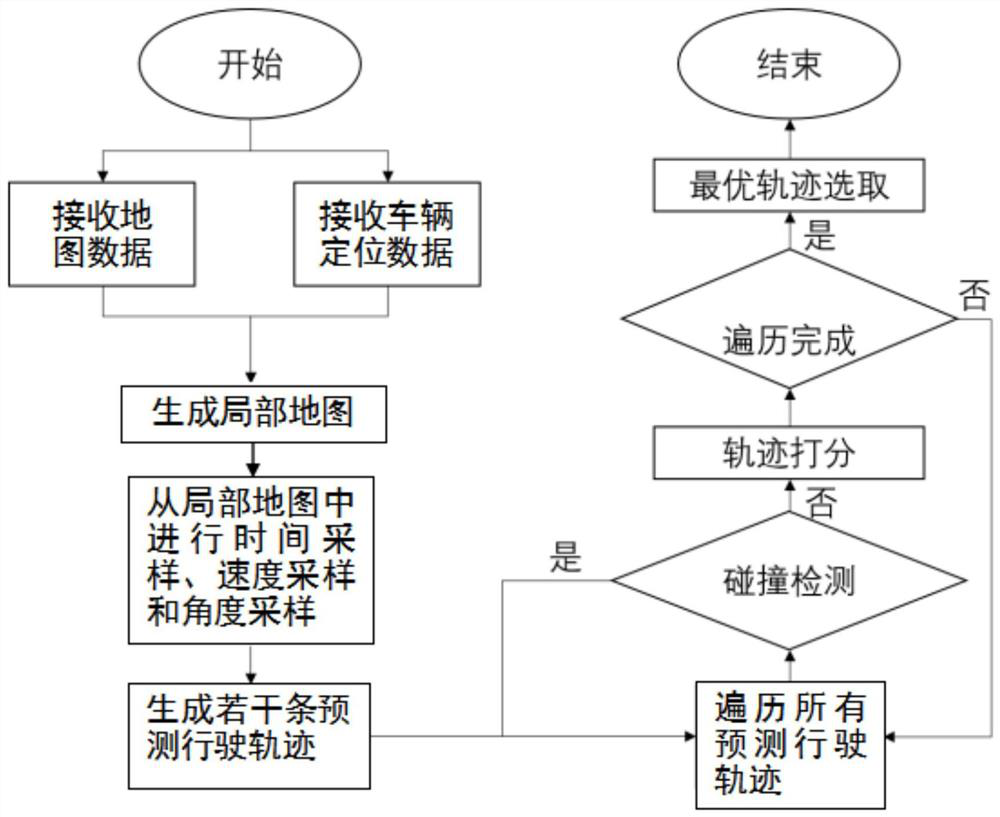
[0049] In the automatic driving local path planning system of the present invention, it includes: a data collection module and a path planning module. The data collection module is used to collect map data and vehicle positioning data of the area where the vehicle will drive, and the path planning module is used for the automatic driving local path planning method described in the present invention.
[0050] f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More