

Robot vibration suppression method
A robot and robot system technology, applied in the field of robotics, can solve the problems of high cost, affecting the stability time and positioning accuracy, residual vibration at the end of the robot, etc., achieve low cost, wide application range, and avoid the effect of interface parameter input
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
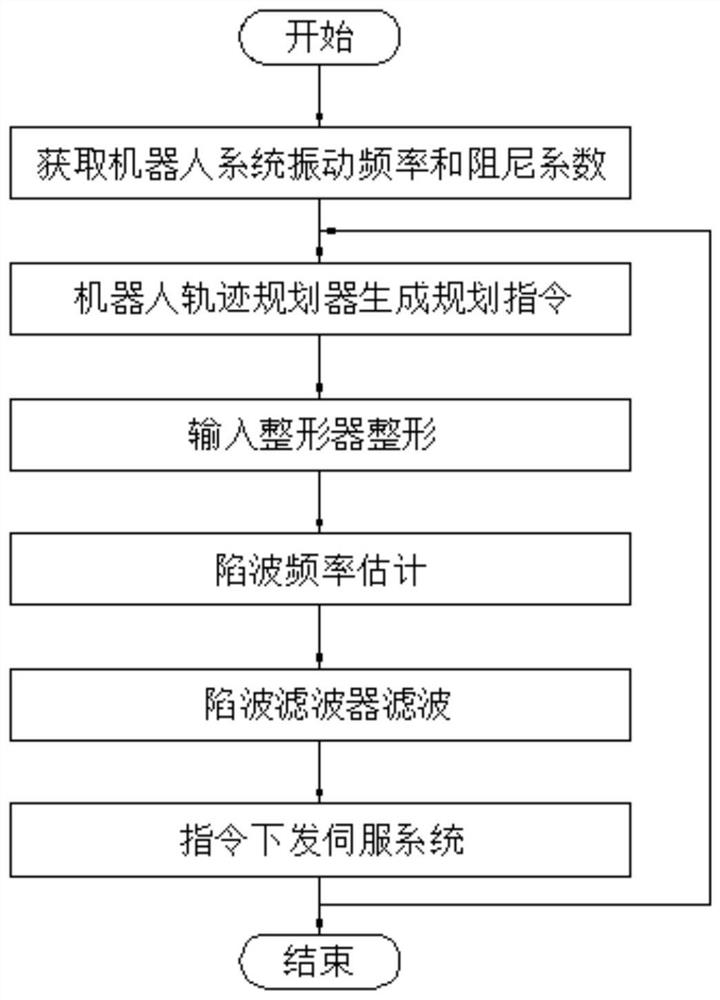
[0024] In an embodiment of the present invention, a method for suppressing vibration of a robot includes the following steps:
[0025] S1: Obtain the vibration frequency ω and damping coefficient ζ of the robot system through mechanical characteristic analysis;
[0026] S2: The instruction generated by the robot trajectory planner is convoluted with the pulse signal input to the shaper to generate an instruction after shaping, and store the generated instruction;
[0027] S3: After shaping, the instruction is input to the adaptive notch filter, which is also used to perform anti-interference processing on the pulse signal and generate the target signal;
[0028] S4: The output signal of the adaptive notch filter is used as the command of the servo system to control the movement of the robot.
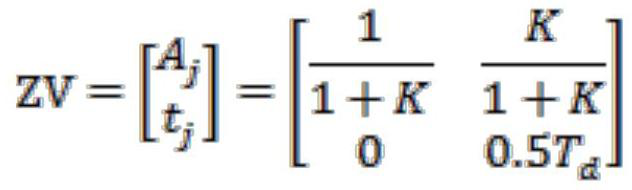
[0029] Preferably: the input shaper includes but not limited to ZV input shaper and ZVD input shaper, wherein,
[0030] The ZV input shaper formula is as follows:
[0031]
[0032]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More