Steering stability control method for in-wheel motor driven vehicle
A stability control and in-wheel motor technology, applied in the field of automobile steering control, can solve the problems of not considering the influence of vehicle speed, broad driving state division conditions, and low precision of steering stability control, so as to achieve accurate calculation, improve steering stability, and improve The effect of control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The following specific embodiments are used to further describe the technical solution of the claims of the present invention in detail, so that those skilled in the art can understand the claims more clearly. The protection scope of the present invention is not limited to the following specific examples. The protection scope of the present invention includes the technical solution of the claims of the present invention made by those skilled in the art and is different from the following specific embodiments.
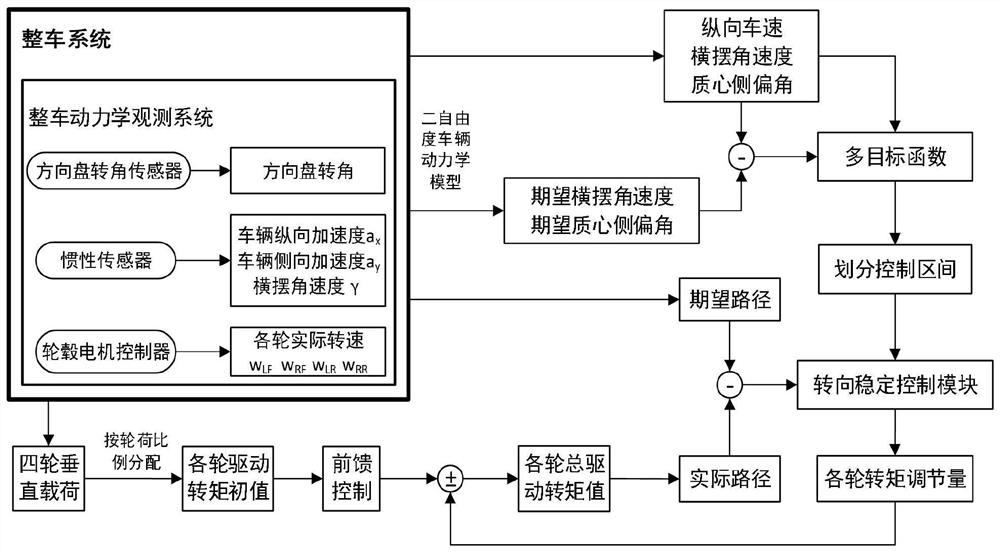
[0029] Such as figure 1 As shown, a steering stability control method for an in-wheel motor driven vehicle, the main control idea is as follows: firstly, the motion parameters of the vehicle are obtained according to the vehicle dynamics observation system, including four-wheel vertical load, yaw rate, center of mass side slip angle and For the longitudinal vehicle speed, the initial value of the driving torque of each wheel is obtained according to the vertical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More