Large-scene non-common-view multi-camera calibration method
A calibration method and a non-common technology, applied in satellite radio beacon positioning systems, image data processing, measurement devices, etc., can solve the problems of limiting the placement angle and placement of cameras, and reducing the coverage of cameras to test scenes, etc. Achieve the effect of avoiding excessive noise extraction and simple site layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
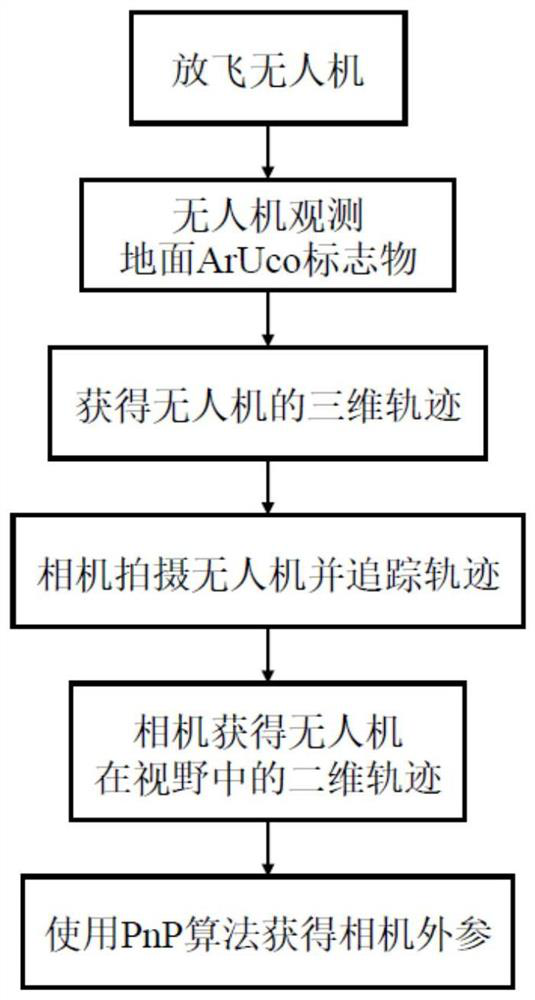
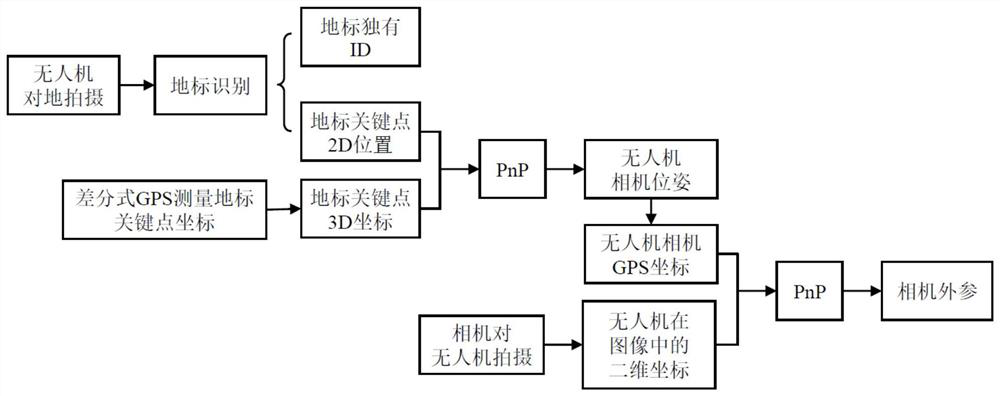
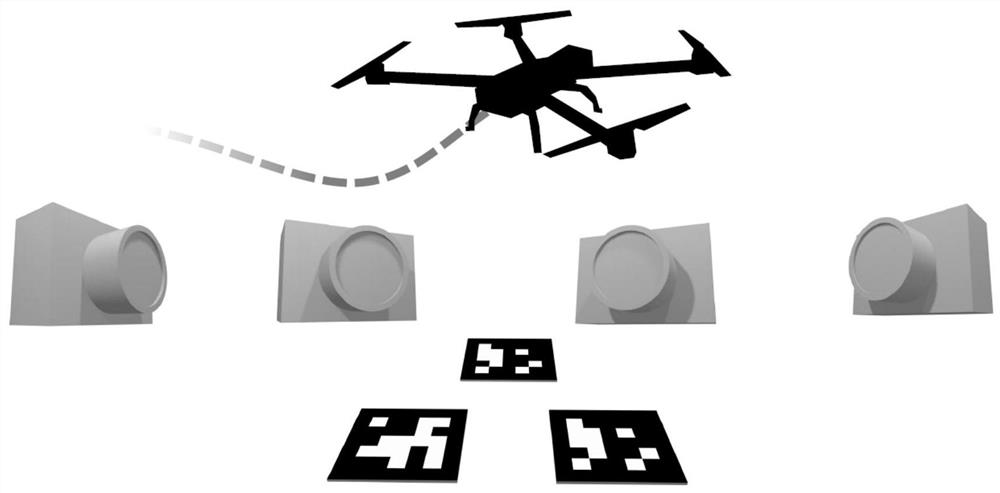
[0031] The invention utilizes the characteristics of strong maneuverability and high degree of freedom of the rotary-wing unmanned aerial vehicle in large-scale and complex scenes, and uses the unmanned aerial vehicle as a relay target auxiliary system to complete the calibration of multi-camera external parameters. At the same time, in order to solve the problem of requiring a common field of view, the present invention places prominent markers on the ground to determine the position of the drone, and then calculates the multi-camera extrinsic parameter matrix through the position of the drone under the multi-camera perspective. The system operation process is as figure 1 shown.
[0032] The invention is mainly divided into two main parts: acquisition of the real trajecto...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap