

Enhanced lower limb exoskeleton robot weight-bearing walking balance system and balance method
An exoskeleton robot and balance system technology, which is applied in the field of enhanced lower limb exoskeleton robot load-bearing walking balance system and balance field, can solve the problems of the wearer's center of gravity tilted, lacking, and the wearer's shoulders being unbalanced, so as to ensure the wearer's weight. Force balance, reduce tipping, avoid the effect of excessive tilting of the center of gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
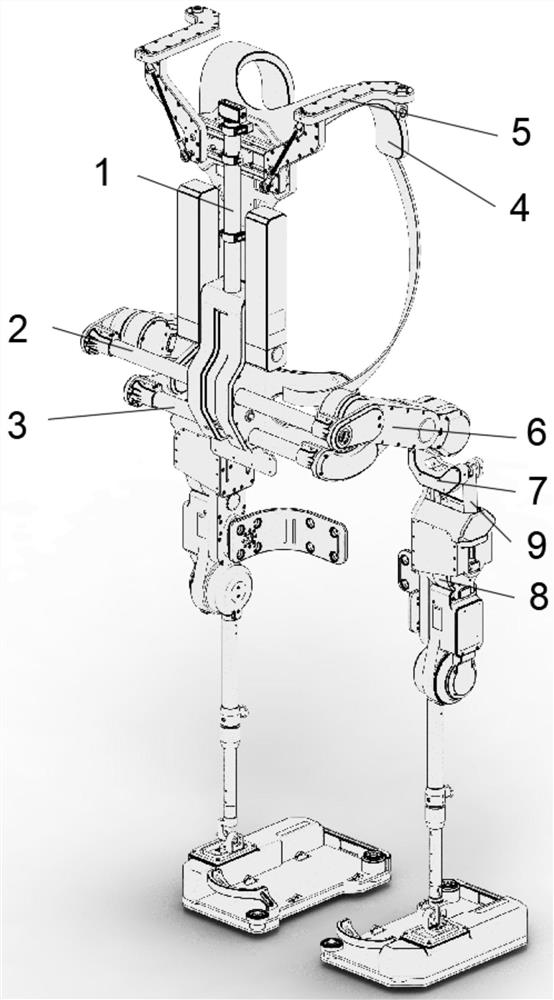
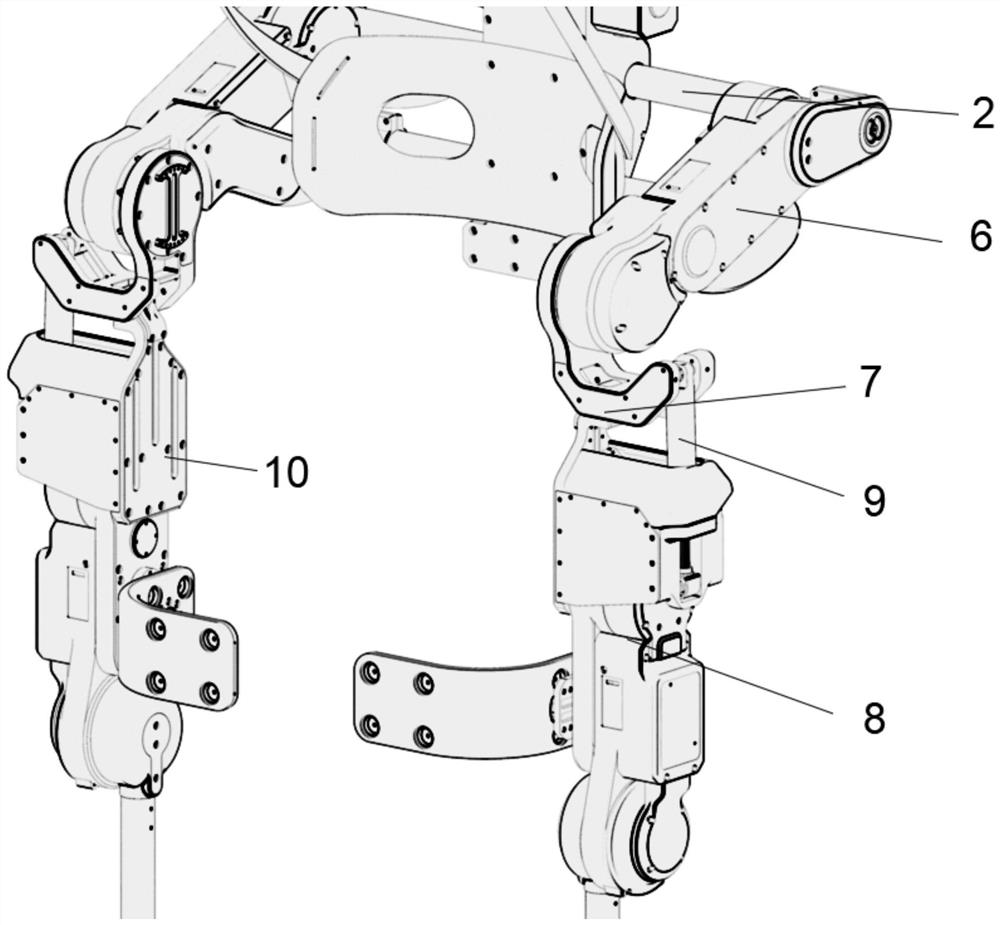
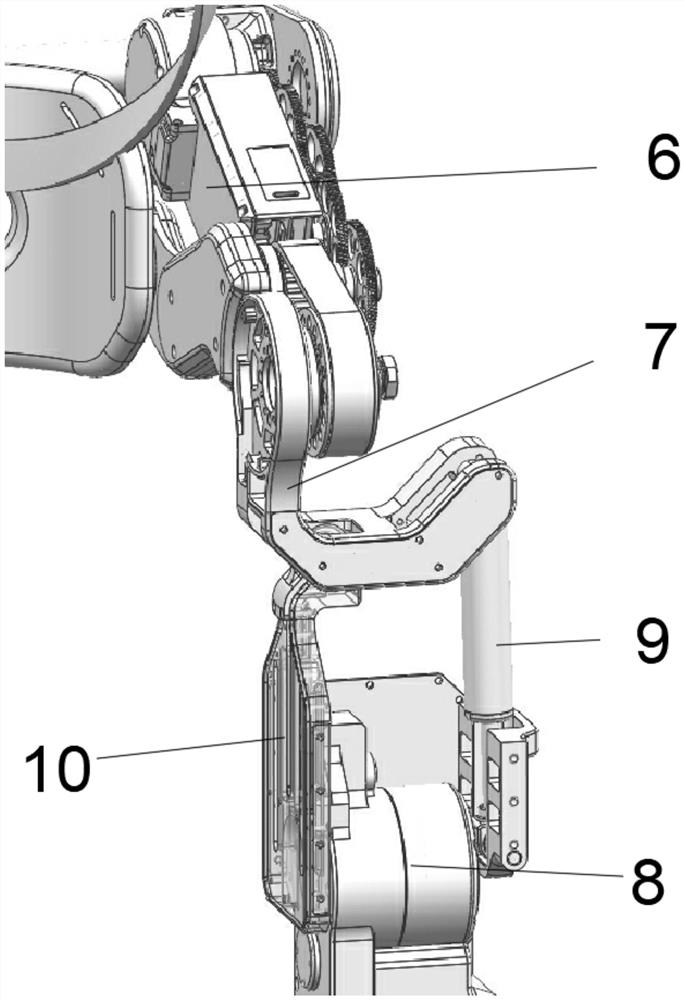
[0023] see Figure 1~4 , in an embodiment of the present invention, an enhanced lower extremity exoskeleton robot load-bearing walking balance system and balancing method, including a bracket 1, the top of the bracket 1 is fixedly connected with a shoulder belt 4, and the top of the bracket 1 is symmetrically arranged with two A shoulder load-bearing frame 5, the bottom side wall of the support 1 is symmetrically fixed through the first cross bar 2 and the sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More