

Path selection method and path selection device
A path selection and path point technology, applied in instruments, data processing applications, forecasting, etc., can solve the problems of low path selection efficiency and high complexity of inequality constraints, so as to improve the path selection efficiency, reduce the amount of calculation, and improve the path selection. effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
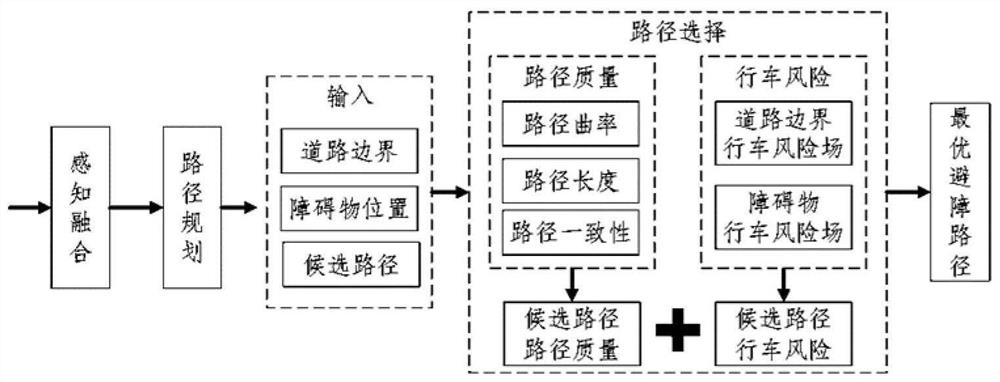
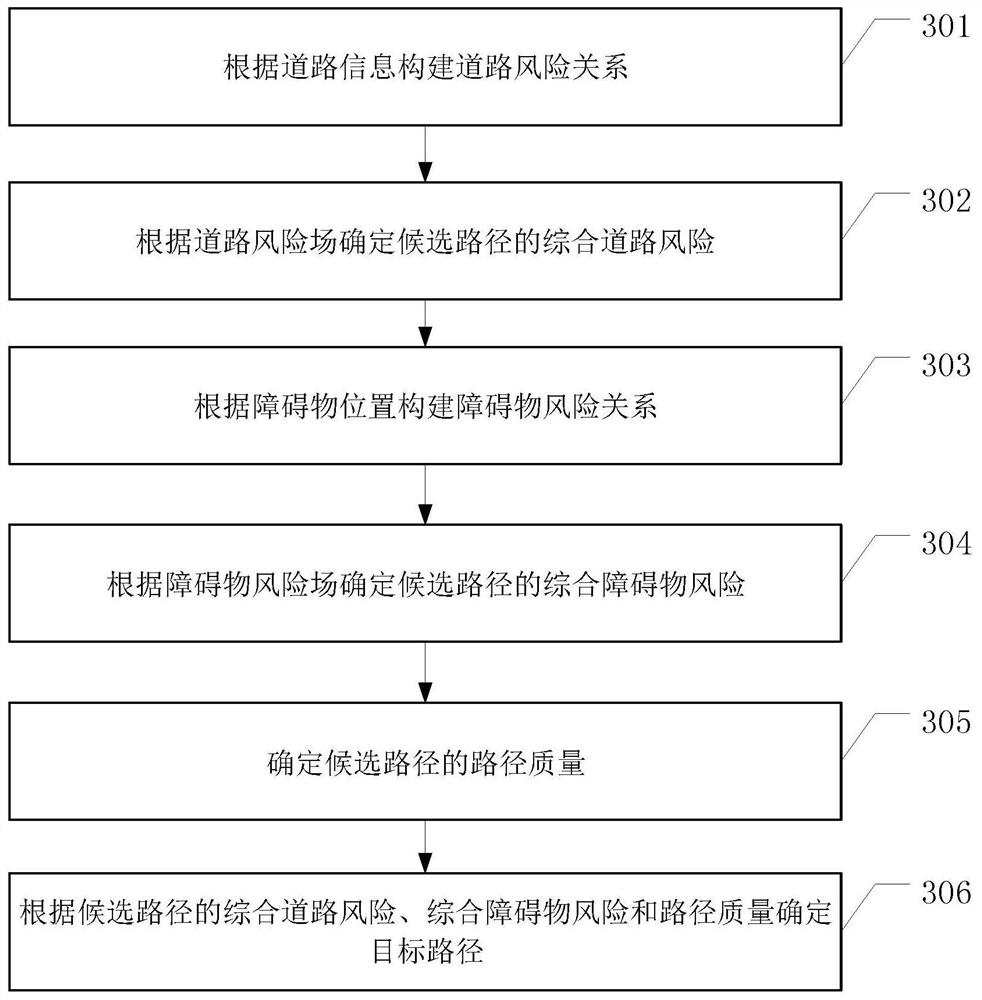
[0059] The embodiment of the present application provides a route selection method, which is used for route selection in intelligent driving, which can avoid selecting candidate routes one by one, reduce the calculation amount during route selection, and improve the efficiency of route decision-making.
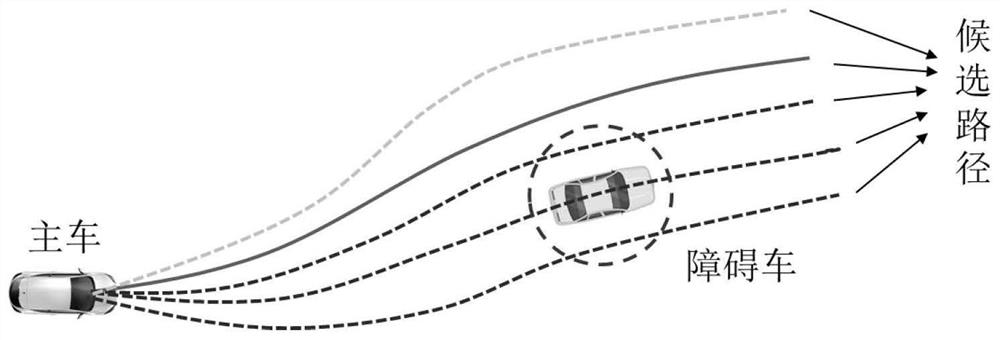
[0060] The embodiment of the present application can be applied to the movement of various moving objects (including motor vehicles, non-motor vehicles, pedestrians or robots, etc.) on various forms of paths (including expressways, urban roads, country roads or indoor paths, etc.), Subsequent embodiments are described by taking a vehicle or a lane as an example, but those skilled in the art can extend it to the path planning field of other objects, which is not specifically limited here.
[0061] In the embodiment of this application, it is assumed that the unmanned vehicle is driving on a structured road, and the actual application scenario may include multiple lanes. In the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More