

A method of positioning and composition of underwater robot based on multi-sensor fusion
An underwater robot and composition technology, applied in the direction of instruments, computer components, sound wave reradiation, etc., can solve the problem that the sensor cannot be used accurately, and achieve the effect of enhancing real-time and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below with reference to the accompanying drawings.
[0022] The invention belongs to the field of underwater robot positioning, in particular to the problem of the accuracy of synchronous positioning and composition of underwater robots during navigation. The problem that sensors cannot be used accurately to meet the needs of underwater robots for long-term sailing operations.
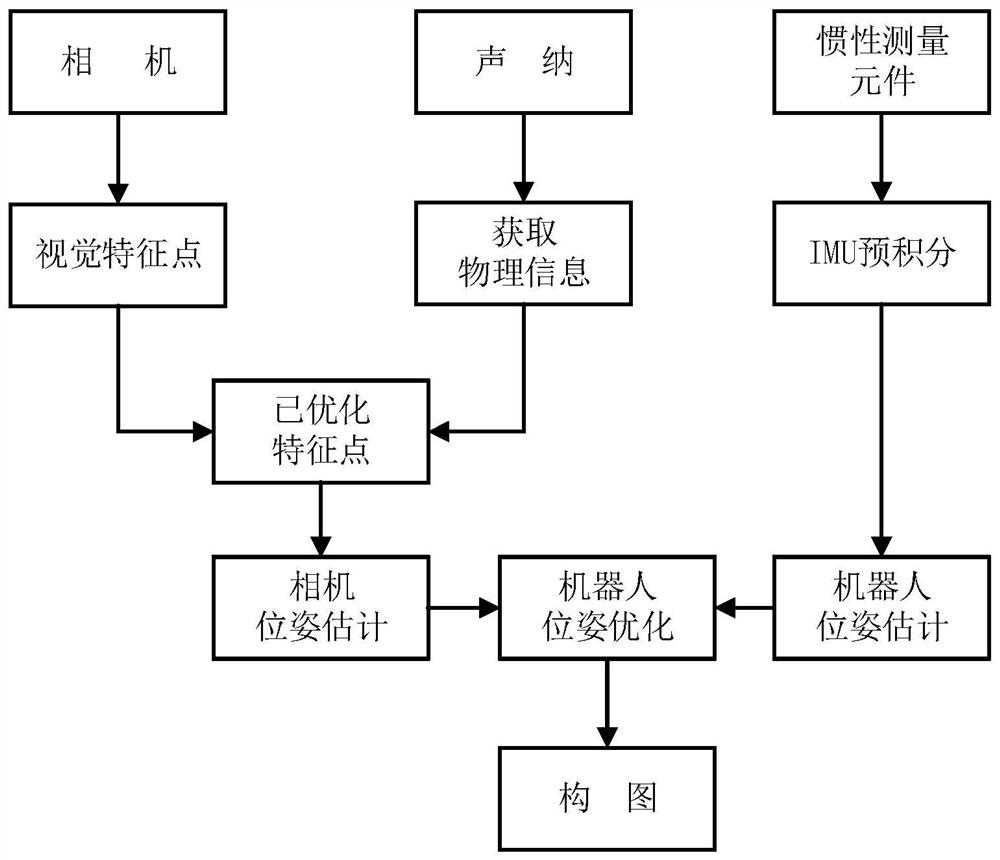
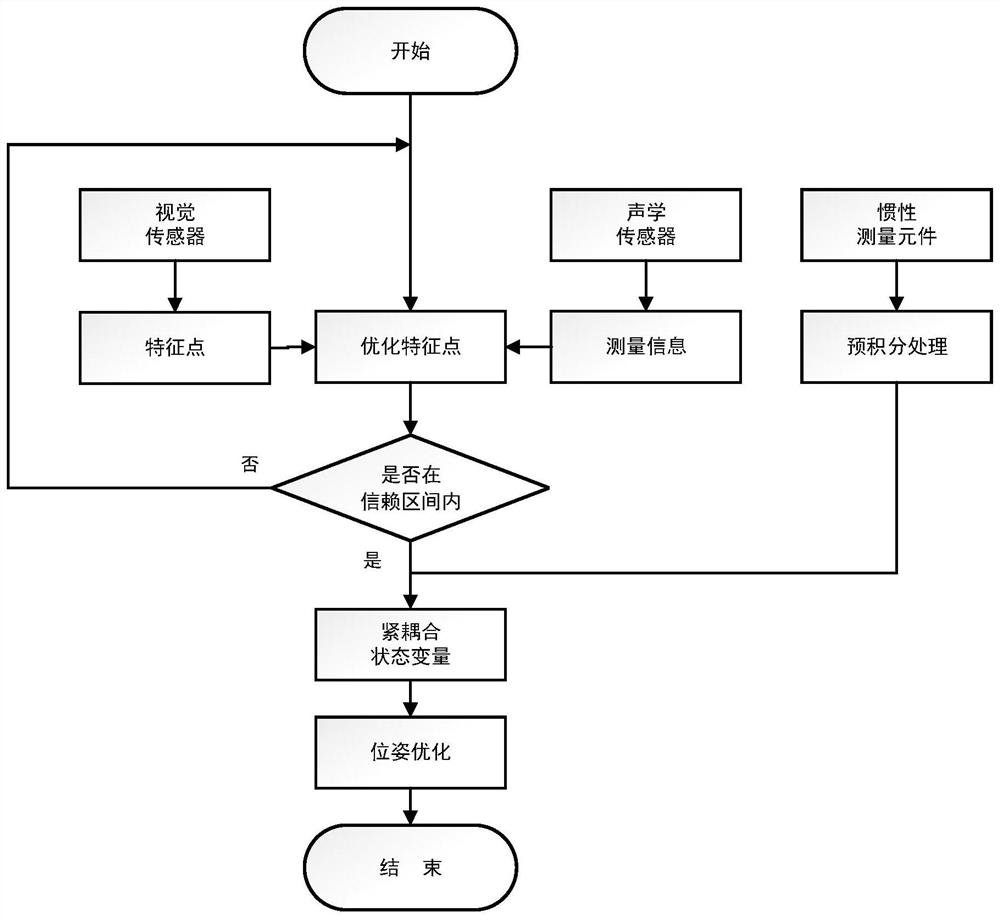
[0023] The purpose of the present invention is to overcome the problem that the sensor cannot be used accurately due to the harsh underwater environment, and to provide a method for positioning and composing an underwater robot based on multi-sensor fusion. The invention utilizes the visual sensor and acoustic sensor installed by the underwater robot, and combines the working principle of the sensor to optimize the obtained road sign information; and then interacts with the inertial measurement element to obtain the navigation state of the underwat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More