

Mechanical arm force feedback system, method, control method and control terminal
A feedback system and robotic arm technology, applied in the field of medical devices, can solve the problems of difficult control, limited application, complex structure, etc., and achieve the effect of expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
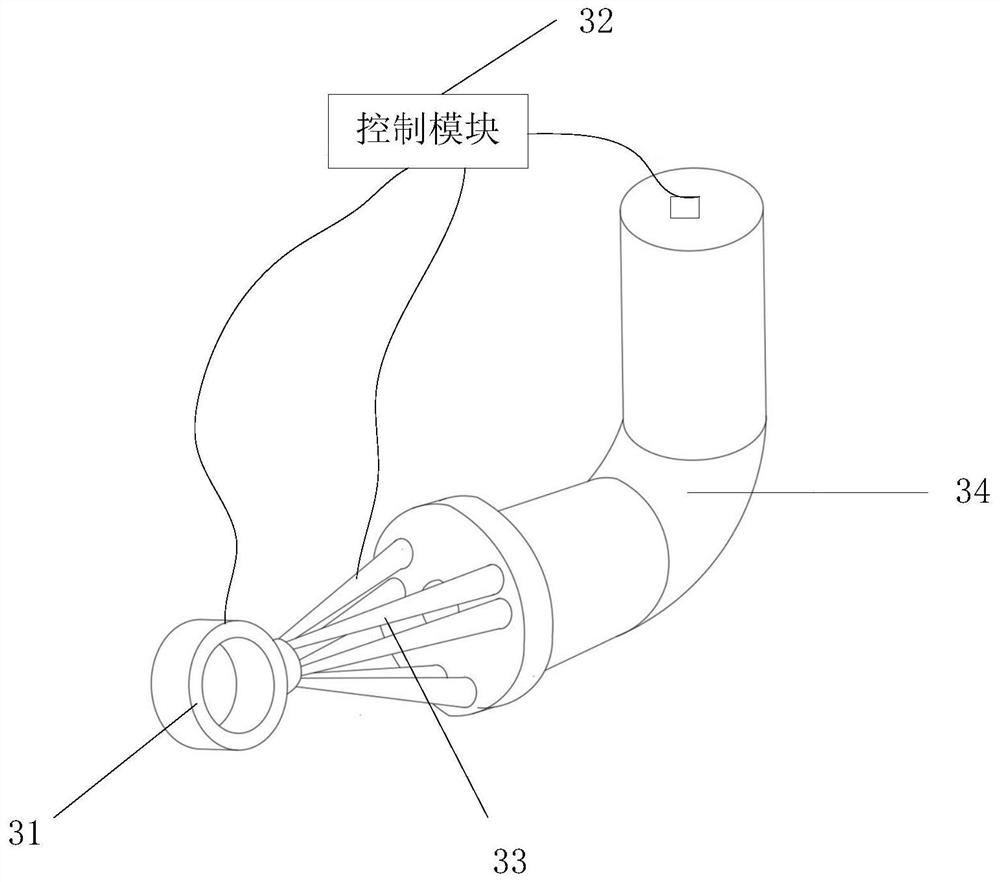
[0054] Example 1: External-mounted robotic arm force feedback system for assisted surgery, such as image 3 A schematic diagram of the structure of the system is shown.
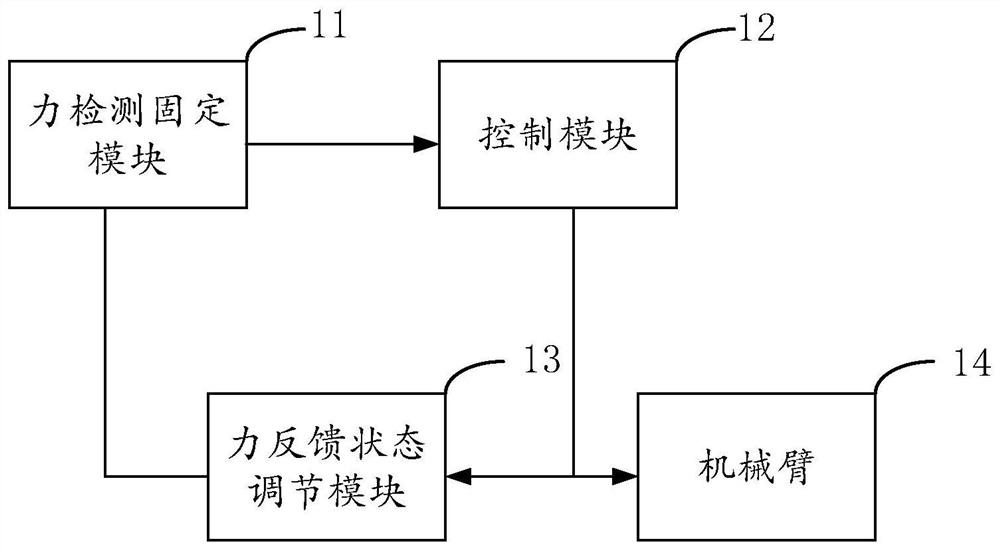
[0055] The system includes: a force detection fixing ring 31 , a main control system 32 , a force feedback adjustment mechanism 33 and a mechanical arm 34 .
[0056] The force feedback adjustment mechanism 33 is respectively connected with the force detection fixing ring 31 , the main control system 32 and the mechanical arm 34 , and the force detection fixing ring 31 is connected with the main control system 32 . The force detection fixing ring 31 is used to fix the operator's upper arm and collect the operator's force application data and transmit it to the main control system 32 , so that the main control system 32 can judge whether the operator is in a state of autonomous force application through an algorithm. The distal end of the robotic arm 34 is provided with an electrical interface for directly con...
specific Embodiment
[0059] like Figure 4 Shown is a schematic flowchart of a method for force feedback of a robotic arm in an embodiment of the present invention.
[0060] The method includes:
[0061] Step S41: Determine the force applying state of the operator according to the force applying data collected by the force detection and fixing module, wherein the force applying state includes an active force applying state and a non-active force applying state.
[0062] Optionally, the force application state of the operator is determined according to the force application data collected by the received force detection and fixing module, wherein the force application state includes: an active force application state and a non-active force application state; wherein, The force application data is the force application data of any part of the operator, which is not limited in this application; for example, the force application data at the wrist.
[0063] Optionally, the force detection fixing mod...
Embodiment 2
[0072] Example 2: The external mechanical arm force feedback method for assisted surgery, such as Figure 5 A schematic diagram of the structure of the system is shown.
[0073] The method includes: fixing the wristband to collect the force application data of the operator; based on the force application threshold, the control system judges the force application situation of the operator based on the force application threshold value received by the force detection and fixing module, that is, whether the operator is in the force application state. The state of autonomous force is judged; if the operator is in the state of active force, the force feedback adjustment mechanism is activated, and the braking mechanism of the mechanical arm is unlocked at the same time; if the operator is in the state of involuntary force, the force feedback adjustment The mechanism remains locked, so that the robotic arm also maintains the braking state synchronously, so that the robotic arm can h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More