

Obstacle map construction method
A map construction and obstacle technology, applied in two-dimensional position/channel control and other directions, can solve problems such as road surface prediction that cannot be moved by robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with specific embodiment:
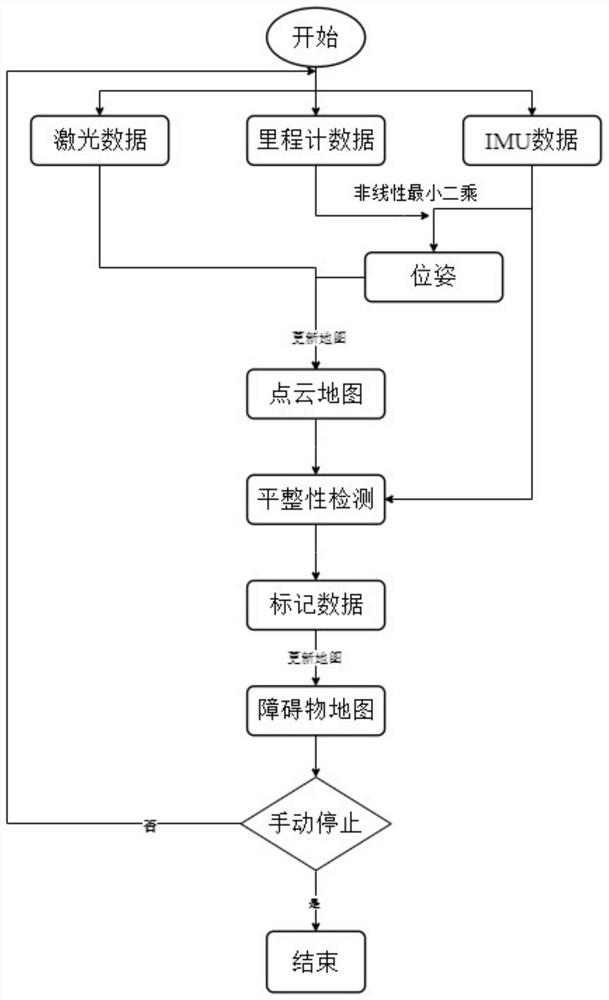
[0056] Such as figure 1 As shown, a kind of obstacle map construction method described in the embodiment of the present invention, the general process is as follows: 1) first obtain the optimal pose at each moment in the process of advancing the mobile robot equipped with multiple laser ranging modules, and then Combining laser data to obtain a point cloud map that collects all laser ranging data;
[0057] In this step, by combining the IMU and the visual odometer, nonlinear least squares is used to obtain the optimal pose of the mobile robot at each moment during the forward process. The specific process is as follows:
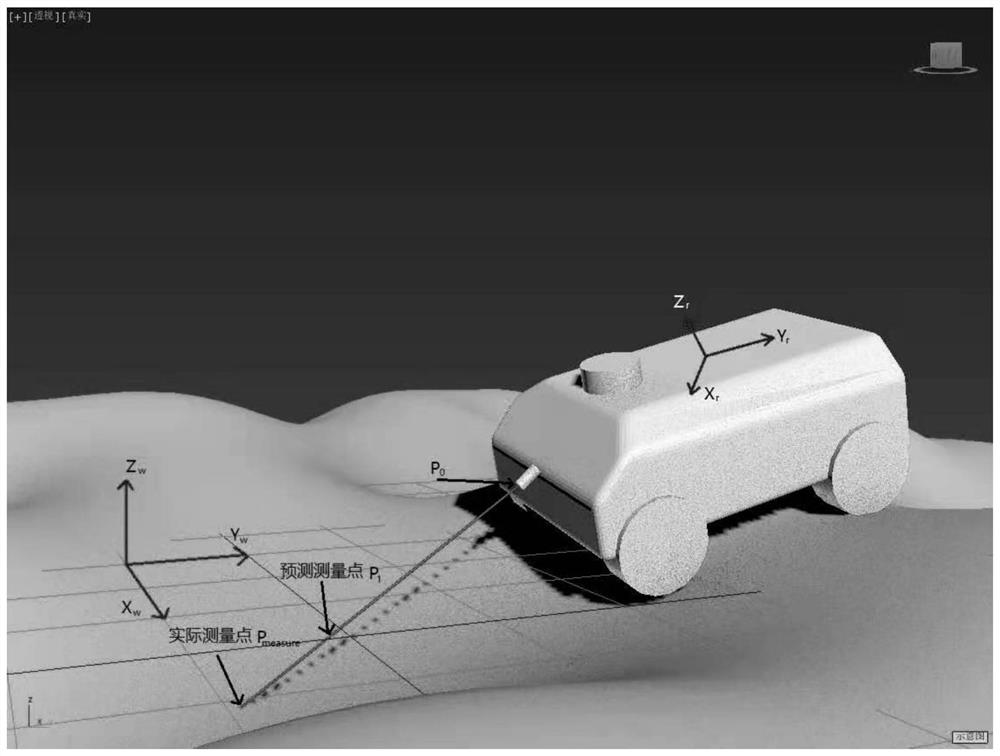
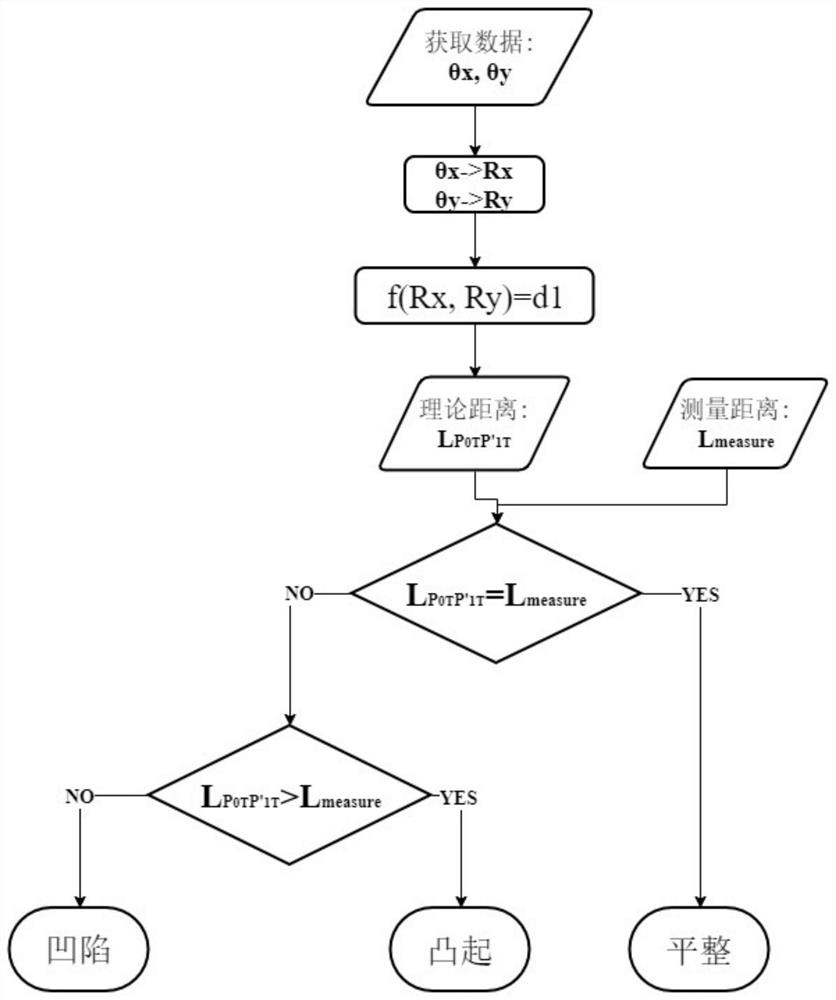
[0058] Since the laser ranging module is a multi-line laser ranging module, set P 0 ,P 1 point as a reference, then each extended line of laser light or scanning laser light at different times is consistent with the reference point P 0 ,P 1 There is a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More