

Robot slam method and system for outdoor feature sparse environment
A robotic and sparse technology, applied to instruments, computer components, calculations, etc., can solve problems such as errors, unstable features, and blurred descriptions of visual features, and achieve the effects of improving positioning capabilities, high operating efficiency, and strong promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0094] The task of the present invention is to face the outdoor feature sparse environment, aiming at the problems existing in the current robot real-time positioning and mapping algorithm, to provide a method to eliminate the influence of the scene image information by the drastic changes of the lighting conditions through image preprocessing, and improve the feature extraction algorithm by improving the feature extraction algorithm. To obtain more robust and uniform features, use the visual loss weight optimization algorithm based on IMU pre-integration for the globally extracted image features to optimize the visual loss function, and then obtain more accurate robot positioning and mapping results.
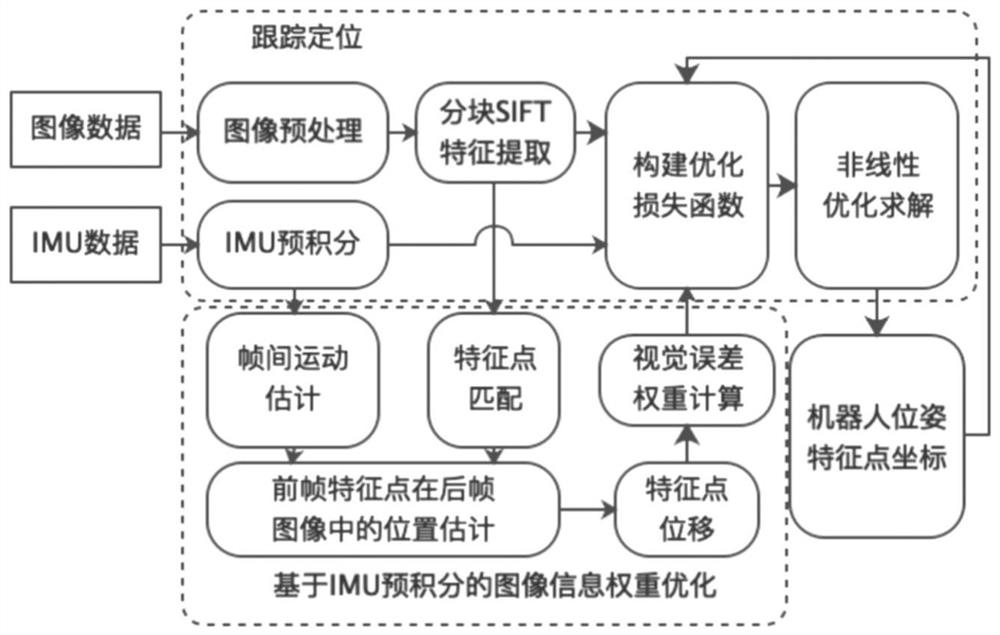
[0095] According to a robot SLAM method for outdoor feature sparse environment provided by the present invention, such as Figures 1 to 5 shown, including:
[0096] According to the provisions of the present invention, the system needs to input the collected environmental image...
Embodiment 2
[0221] Example 2 is a modification of Example 1
[0222] The positioning and mapping algorithm of the present invention includes three parts: (1) image preprocessing in an outdoor feature sparse environment; (2) block SIFT feature extraction; (3) visual loss weight optimization based on IMU pre-integration, which consists of the following steps composition:
[0223] Step 1.1: Use the CLAHE local histogram equalization algorithm for images in an outdoor feature sparse environment;
[0224] Step 1.2: Use the histogram equalization algorithm on the image after partial equalization.
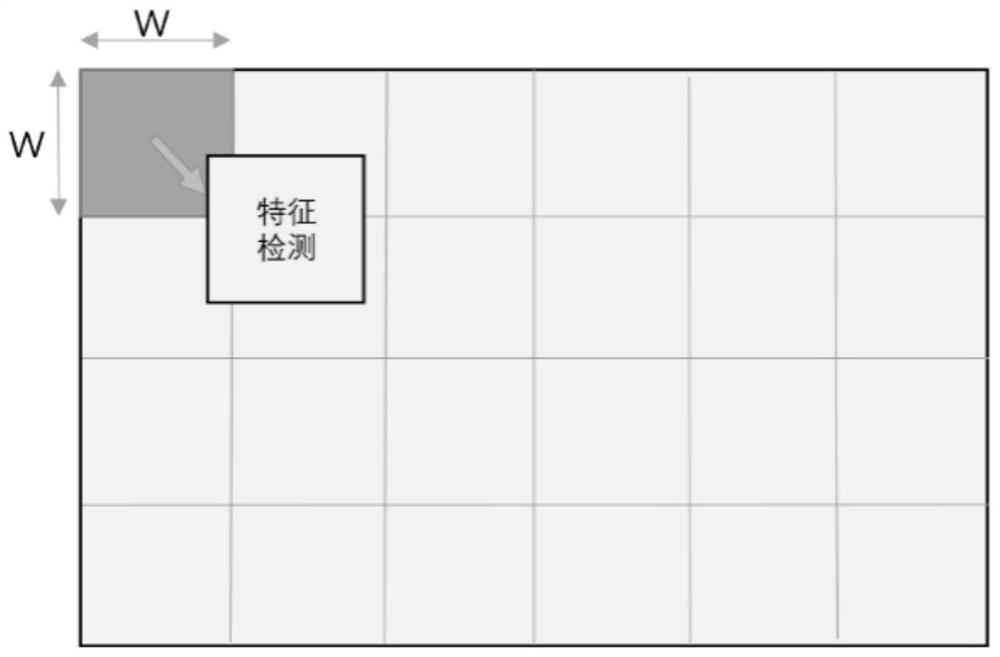
[0225] Step 2.1: Divide the image into small blocks, and extract SIFT features in the small blocks respectively;
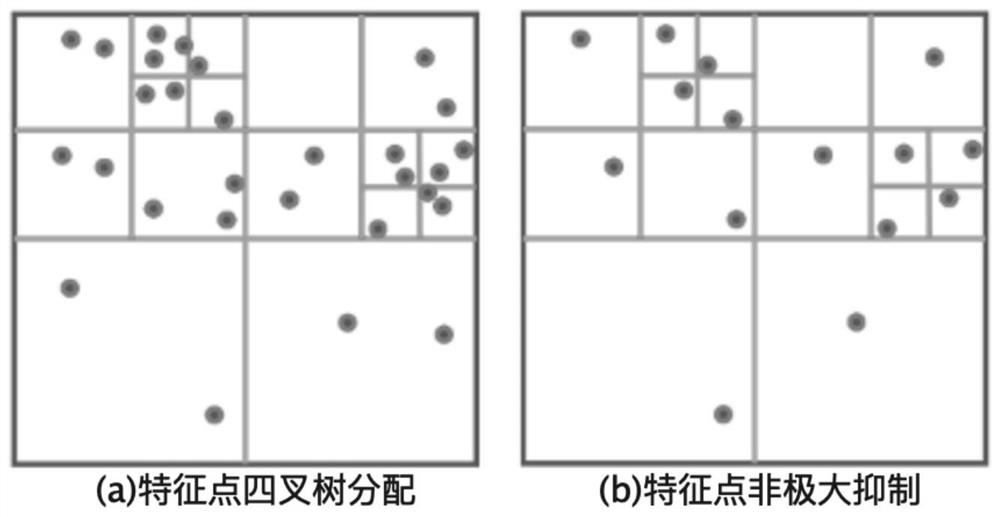
[0226] Step 2.2: All the features are allocated by quadtree. There are two left and right image blocks in the initial image. When the number of feature points in the image block is not less than 4, the left and right and top and bottom are divided into four small image blocks on averag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More