

Object surface deformation feature extraction method based on line-scanning 3D point cloud
A technology of object surface and 3D point cloud, which is applied in image analysis, image enhancement, instruments, etc., and can solve problems such as inability to meet measurement requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0139] 1) Knowledge base
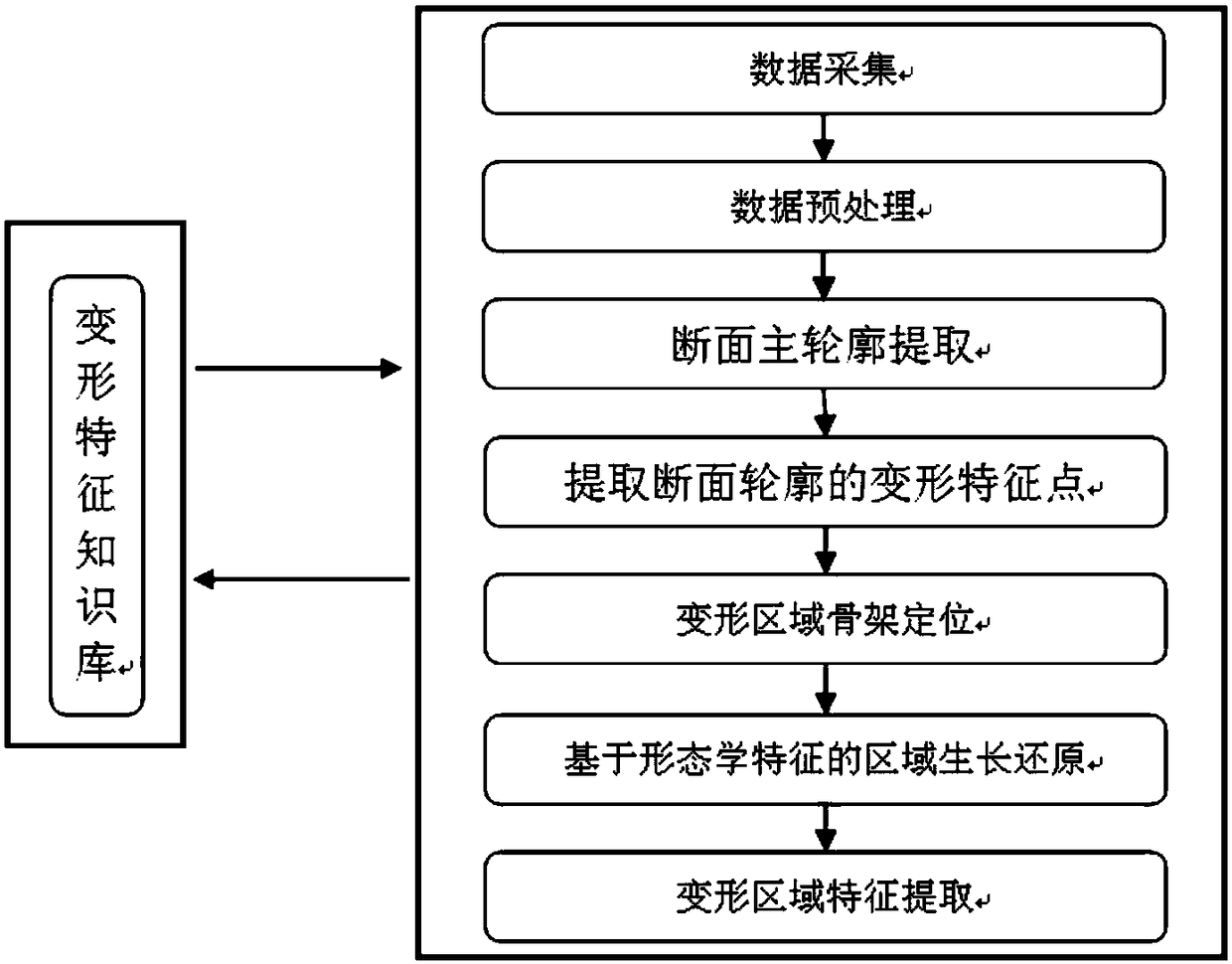
[0140] The embodiment of the technical solution of the present invention takes asphalt pavement crack recognition as an example to describe a method for extracting features of asphalt pavement cracks based on line scanning three-dimensional point cloud.
[0141] Asphalt pavement crack feature knowledge base information includes: pavement texture model, crack length > 10cm, crack depth > 1mm, crack directionality (horizontal crack, longitudinal crack, crack, block crack), continuity, aggregation, crack on the cross-section In the outline, there is a small area deformation, the crack is located below the pavement surface, the crack depth is greater than the general pavement texture depth, the crack has a certain width, the crack has the area characteristic, and the crack has the damage degree characteristic.
[0142] Among them, the calculation method of the crack area, the category of the crack direction, and the degree of crack damage can be defined ...
Embodiment 2
[0158] 1) Knowledge base
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More