

Overhead line robot obstacle crossing method, device and equipment based on AI visual identification
A visual recognition and robotics technology, applied in the field of robotics, can solve the problems of easily damaged collision sensors and inability to successfully overcome obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
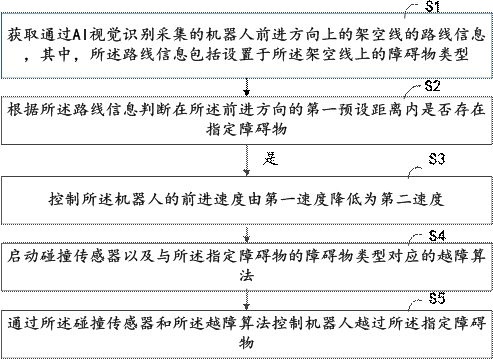
[0053] refer to figure 1 , an embodiment of the present application based on the AI visual recognition method for the overhead line robot obstacle, including:
[0054] S1: Obtain the route information of the overhead line in the forward direction of the robot collected through AI visual recognition, wherein the route information includes the type of obstacles set on the overhead line;
[0055] S2: According to the route information, it is judged whether there is a designated obstacle within a first preset distance in the forward direction;
[0056] S3: If yes, then con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More