

Underwater target positioning method based on probability graph model
A probabilistic graphical model and positioning method technology, applied in positioning, measuring devices, instruments, etc., can solve the problems of low information update rate and inability to obtain high precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0090] Specific embodiment one: a kind of underwater target localization method based on the probabilistic graph model described in this embodiment, this localization method comprises:
[0091] S1. Under sparse conditions, obtain all the distance data and speed data of a single target within a period of time, and use the distance data and speed data as local variables respectively, and use the factor graph to represent the global joint probability distribution of each local variable to obtain a global function;
[0092] S2. Complement and calculate the global function, solve the marginal function, and obtain the estimated position of the target at each moment;
[0093] S3. The sum-product algorithm is used to calculate the marginal function, and the marginal probability function of each local variable of the joint distribution is solved to obtain target estimation results at different moments.
specific Embodiment approach 2
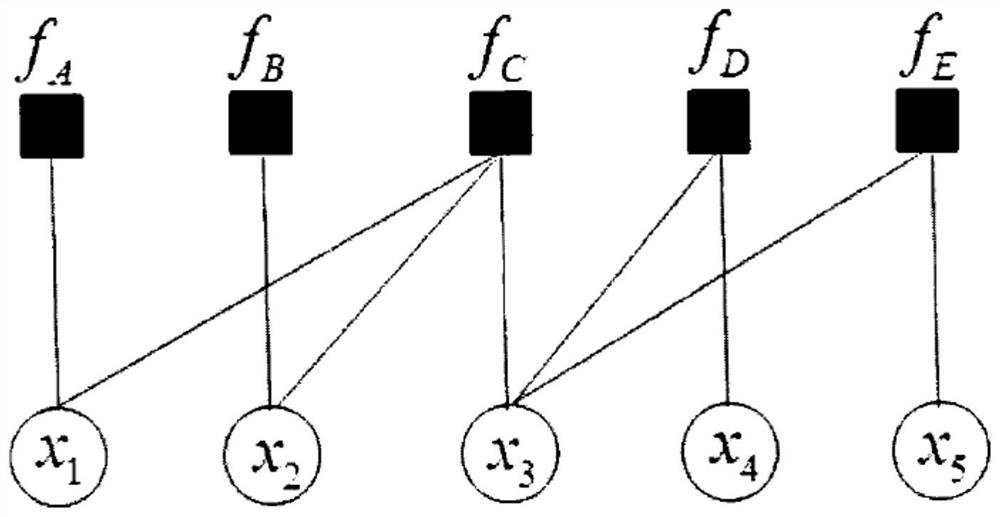
[0094] Specific implementation mode two: the following combination figure 1 Illustrate this embodiment, this embodiment will further illustrate specific embodiment 1, if the global function described in S1 includes five variables, then the global function is expressed as:
[0095] g(x 1 ,x 2 ,x 3 ,x 4 ,x 5 ) = f A (x 1 ) f B (x 2 ) f C (x 1 ,x 2 ,x 3 ) f D (x 3 ,x 4 ) f E (x 3 ,x 5 );
[0096] where: x 1 、x 2 、x 3 、x 4 and x 5 represent five local variables respectively, and the obtained five local functions are f A , f B , f C , f D and f E ;
[0097] The subvariable discrete address set is J={A, B, C, D, E};
[0098] The local function sub-variable sets are: X A ={x 1}, X B ={x 2}, X C ={x 1 ,x 2 ,x 3}, X D ={x 3 ,x 4}, X E ={x 3 ,x 5}.
[0099] In this embodiment, figure 1 In the represented factor graph, there are five variable nodes (circles) corresponding to five variables, five function nodes (squares) corresponding to five ...
specific Embodiment approach 3
[0100] Specific implementation mode three: this implementation mode further explains specific implementation mode two, and the method for calculating and solving the edge function of the global function described in S2 includes:
[0101] Let A i represents the global variable x i , all value sets of i=1,2,3,4,5, when there is a is A i A subset of , then gi (a) represents the global function g(x 1 ,x 2 ,x 3 ,x 4 ,x 5 ) meets x i = sum of all combinations of a;
[0102] The global function g(x 1 ,x 2 ,x 3 ,x 4 ,x 5 ) for variable x i Complementary sum to obtain the marginal function g of the global function i (x i ):
[0103]
[0104] In this embodiment, for variables that do not contain x i The process of summing the remaining variables of is called complement summation. For example: Suppose a global function h consists of three variables, for one of the variables y 2 Find the edge function, you can get:
[0105]
[0106] In this embodiment, according ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More