

Tracking control method and system for wheel type mobile mechanical arm
A mobile robotic arm, tracking control technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of cumbersome process, affecting the accuracy of kinematic modeling, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. For the step numbers in the following embodiments, it is only set for the convenience of illustration and description, and the order between the steps is not limited in any way. The execution order of each step in the embodiments can be adapted according to the understanding of those skilled in the art sexual adjustment.
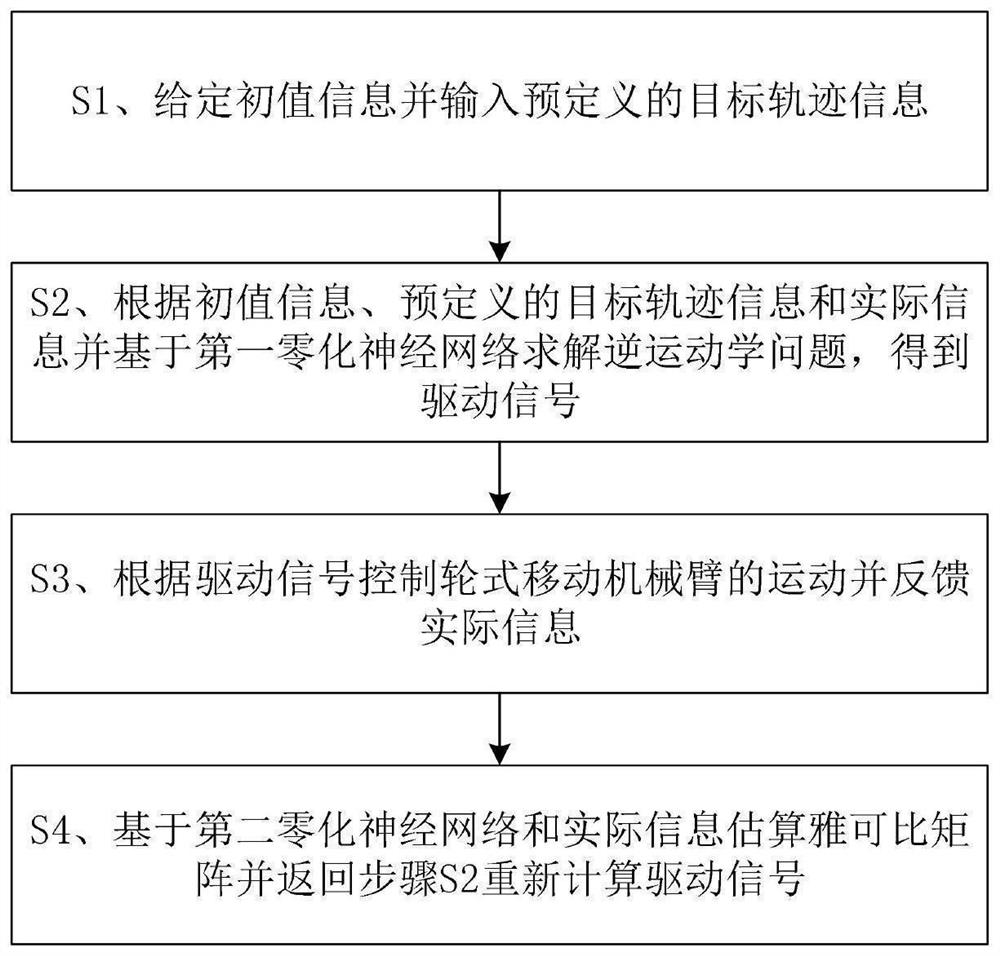
[0046] refer to figure 1 and Figure 4 , the present invention provides a tracking control method for a wheeled mobile robot, the method comprising the following steps:
[0047] S1. Given the initial value information and input the predefined target trajectory information;
[0048] S2. Solve the inverse kinematics problem based on the initial value information, the predefined target trajectory information and the actual information based on the first zeroing neural network, and obtain the driving signal;
[0049] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More