

Hexapod robot impedance control method based on reinforcement learning
A hexapod robot, impedance control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of complex network models, fixed control parameters, difficult to deal with nonlinear time-varying interference, etc., to achieve computational complexity small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to enable those skilled in the art to better understand the solution of the present invention, the object of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are some, not all, embodiments of the present invention, but the embodiments of the present invention are not therefore limited to the following embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
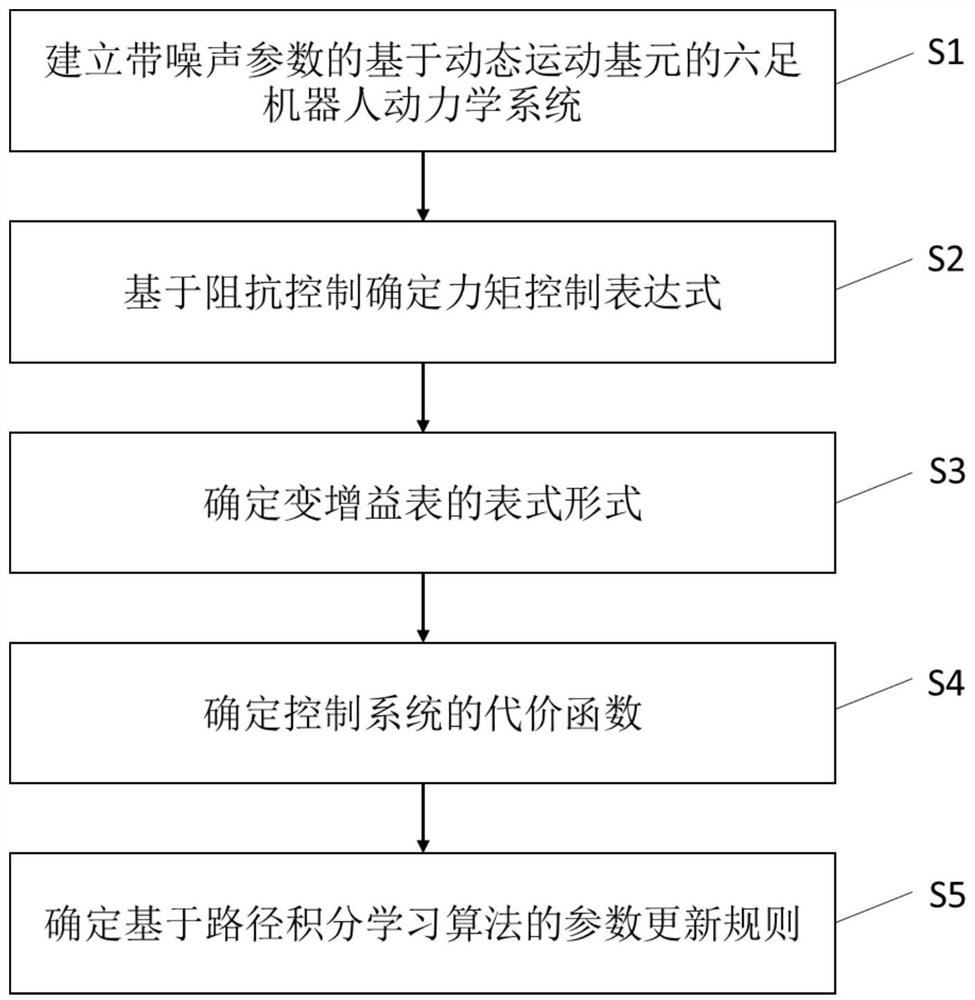
[0046] This embodiment provides a method for controlling the impedance of a hexapod robot based on reinforcement learning, such as figure 1 As shown, the method includes the following steps:
[0047] S1. Establish a hexapod robot dynamics system based on dynamic motion primitives with noise parameters;
[0048] S2. De...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More