

Factor graph co-localization algorithm based on maximum correlation entropy
A maximum correlation entropy, co-location technology, applied in complex mathematical operations, navigation calculation tools, design optimization/simulation, etc., can solve problems such as filter instability and estimation performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in detail below in conjunction with specific implementation examples.
[0074] The present invention provides a factor graph collaborative positioning algorithm based on the maximum correlation entropy criterion, which uses the error formula of correlation entropy as a cost function to process noise with abnormal values, which can better deal with heavy-tailed non-Gaussian observation noise, and is robust Higher reliability, can greatly reduce the influence of heavy tail noise on the positioning accuracy of the system, and improve the performance and stability of the collaborative positioning system. The object of the present invention is achieved through the following steps:
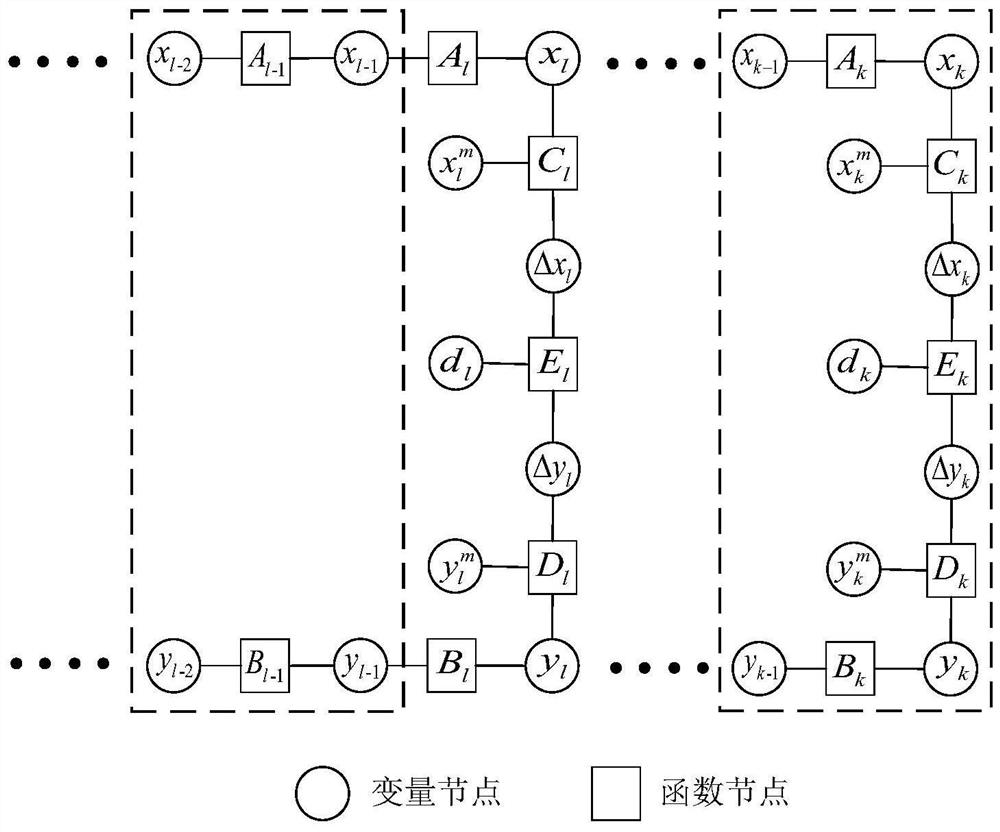
[0075] 1. Establish a co-location algorithm factor graph model based on maximum correlation entropy;
[0076] 2. Perform filter fusion estimation on the position and state information of the system through the maximum correlation entropy criterion.
[007...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More