

A seven-link based robot leg structure
A robot and seven-link technology, applied in the field of robotics, can solve the problems of lack of biped robots, low load, weak strength, etc., to achieve the effect of improving energy utilization, improving load capacity, and reducing peak torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
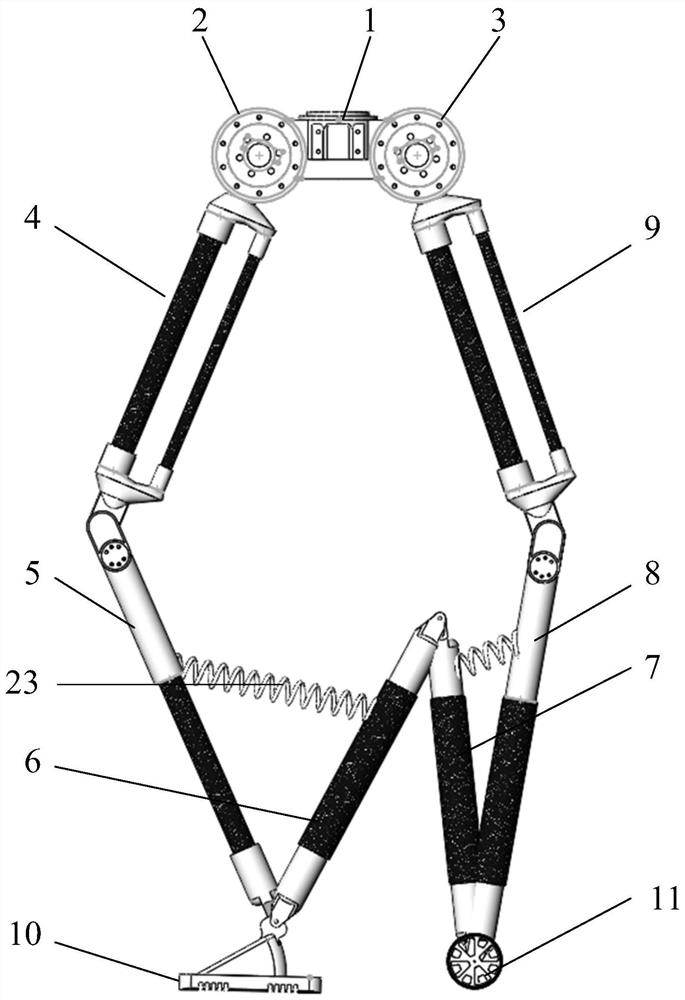
[0036] The present invention provides a seven-link leg structure of a robot, see figure 1 , mainly including the frame 1, the thigh link (the first thigh link 4 and the second thigh link 9), the calf link (the first calf link 5 and the second calf link 8), the auxiliary leg link ( The first auxiliary leg link 6 and the second auxiliary leg link 7), the friction foot 10 and the sliding wheel 11. A hip / knee joint motor 2, 3 is respectively installed on both ends of the frame 1, and the output shaft of the hip / knee joint motor 2, 3 is fixed with the hip joint connector 21. see Image 6 In this embodiment, the hip joint connector 21 is embedded in the groove provided by the frame 1, and the hip joint connector 21 has a rotating ring portion 21b and a connecting portion 21a connected to each other. The rotating ring portion 21b is fixed on the output shaf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More