

Novel suspension-legged robot
A robot and hexapod robot technology, applied in the field of new suspension-legged hexapod robots, can solve the problems that the supporting legs cannot stably support the robot, and the distribution of legs cannot meet the stability requirements, so as to improve the integration of functions, reduce weight, The effect of reducing manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings, but the scope of protection of the present invention is not limited to the following embodiments.
[0019] The principle and implementation of a robot compliance control method based on a contact force observer will be described in detail below, so that those skilled in the art can understand a robot compliance control method based on a contact force observer in the present invention without creative work method.
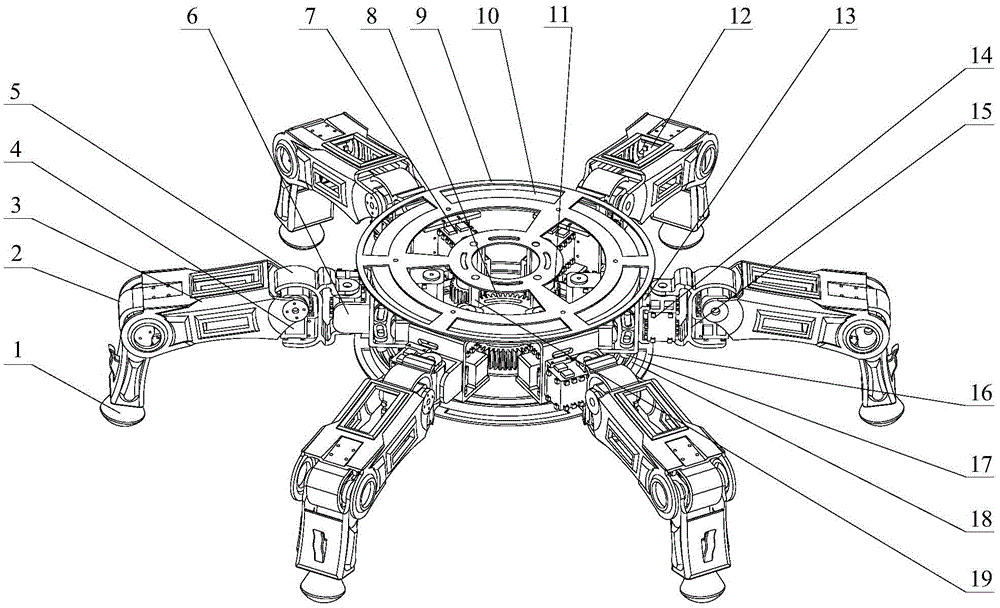
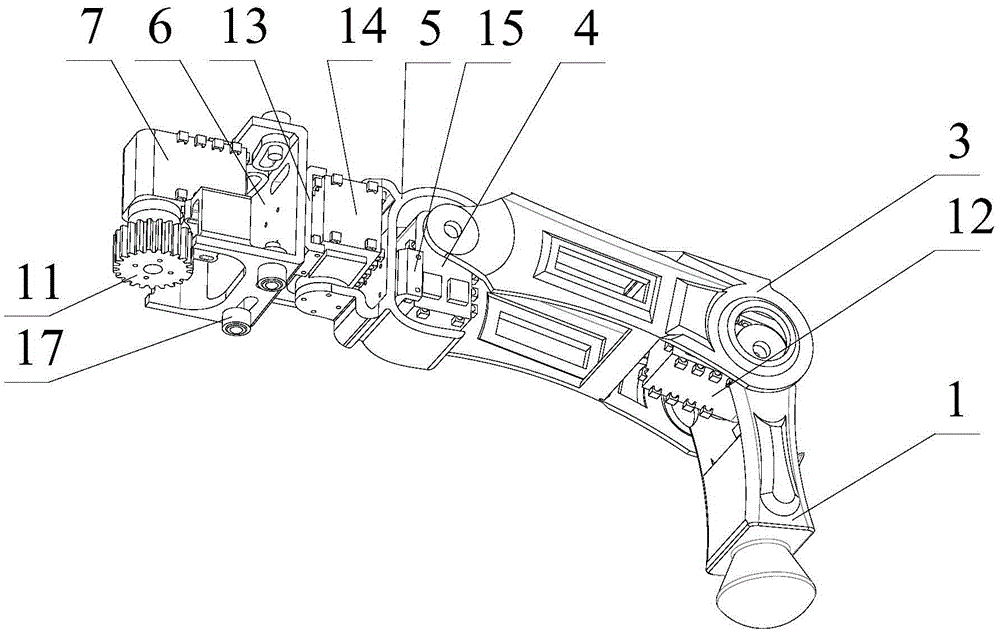
[0020] Such as figure 1 As shown, the novel suspension-legged hexapod robot of the present invention includes six legs and a circular fuselage. The leg includes 3 sections of connecting rods, that is, calf connecting rod 1, thigh connecting rod 4 and hip connecting rod 5. The legs include two traditional joints, knee joint and hip joint, and a mobile joint proposed by the present invention that moves around the fuselage. Wherein th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More