

Deformable wheel-track combined pole-climbing robot
A composite, deformable wheel technology, applied in the field of pole-climbing robots, can solve problems such as difficulty in moving on the ground, insufficient space for equipment, and achieve the effects of convenient transportation, rich functions, and good reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Further explain below in conjunction with accompanying drawing:
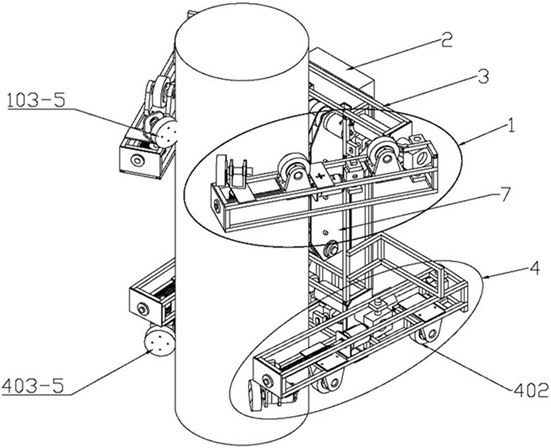
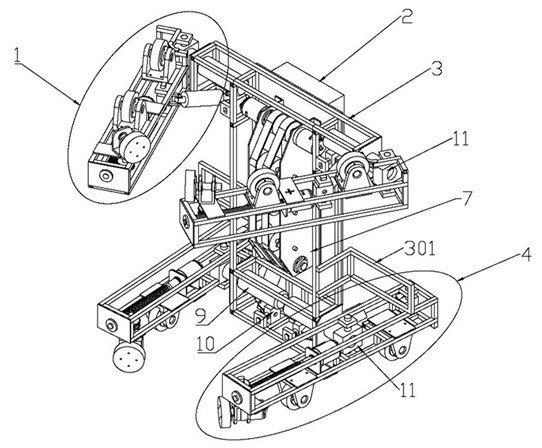
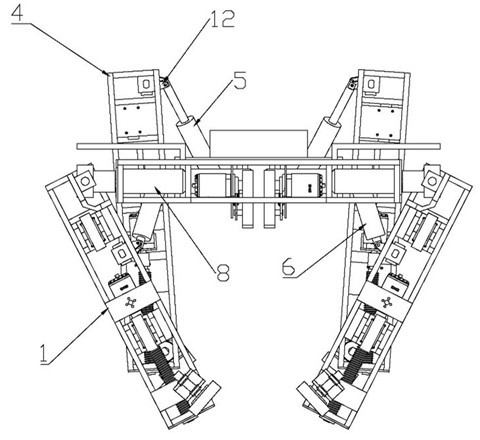
[0033] as attached figure 1 ~ attached Figure 12 As shown, a deformable wheel-track composite pole-climbing robot includes two outer arms 1, a vehicle frame 3, two inner arms 4, two inner arm electric push rods 5, two outer arm electric push rods 6, Two inner arm rotation motor assemblies 9, two outer arm rotation motor assemblies 8, track module 7, power supply module 2;
[0034] The inner arm 4 is hinged with the rotating motor connector 11, the rotating motor connector 11 is coaxially connected with the inner arm rotating motor assembly 9, the inner arm rotating motor assembly 9 is fixed on the vehicle frame 3, and the inner arm electric push rod 5. One end of the inner arm 4 is hinged with the first Hooke hinge 12, and the other end of the inner arm electric push rod 5 is hinged with the vehicle frame 3 through the second Hooke hinge 10. The connection mode between the outer arm 1 and the vehicle f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More