Obstacle avoidance method for unmanned aerial vehicle flying in indoor coal yard
An unmanned aerial vehicle and obstacle avoidance technology, which is applied to instruments, three-dimensional position/channel control, control/adjustment systems, etc., can solve problems such as high requirements, oscillation of obstacle avoidance paths, affecting algorithm processing speed, etc., to achieve accurate measurement, Well-structured effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
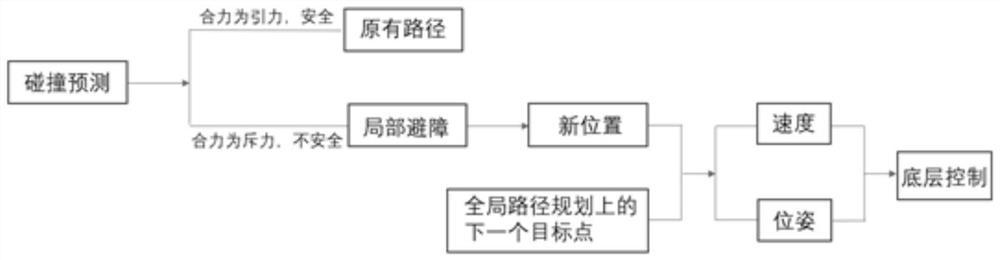
[0033] see figure 1 , the present invention provides a technical solution: an obstacle avoidance method for flying an unmanned aerial vehicle in an indoor coal yard, comprising the following steps:
[0034] S1: Carrying a laser range finder, inertial navigation device and visual camera on the drone;
[0035] S2: During the flight of the UAV, the UAV follows the path planned by the system, and based on the path, obtains information about dynamic obstacles in t...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap