

Quick connector for surgical auxiliary surgical robot
A surgical robot and robot technology, applied in surgical robots, surgery, medical science, etc., can solve problems such as increasing the cost of use and limiting the versatility of surgical robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
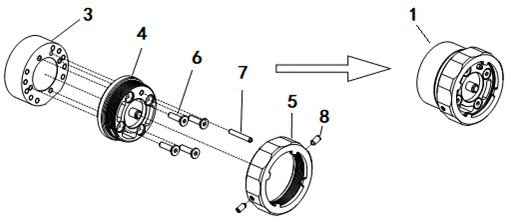
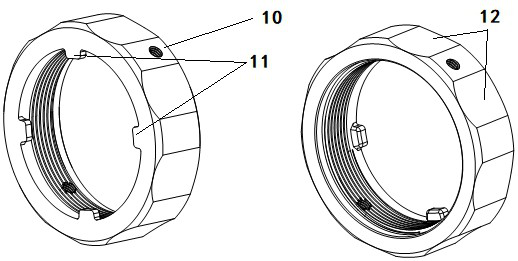
[0030] see Figure 1 to Figure 7 As shown in the illustration, a quick interface for a surgical-assisted surgical robot is a set of assembly parts. The quick interface is a quick-change device composed of a set of locking components, which is used to quickly disassemble and assemble the surgical instrument clamping device at the end of the robot. or a surgical tool, specifically comprising: a connection flange end 1 and a detachment flange end 2, the connection flange end 1 includes a robot flange 3, a connection flange 4 and a connection flange end knob 5, wherein the connection flange 4 passes through The connecting screw 6 is fixed on the robot flange 3 (the two are relatively fixed), the inner wall of the connecting flange end knob 5 is threaded, the outer wall of the connecting flange 4 is threaded, and the thread on the inner wall of the connecting flange end knob 5 is connected to the connecting flange 4 The threads of the outer wall match each other to realize the bolt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More