

Path planning method for unmanned ship based on dynamic obstacle environment
A dynamic obstacle, path planning technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of affecting path planning efficiency, increasing search time complexity, and affecting The sampling efficiency and cost of cruise ships can shorten the path planning time, reduce the difficulty of control and power consumption, and reduce the cost of equipment consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in detail below with reference to the accompanying drawings.
[0031] Step 1: Use unmanned aerial vehicles to collect images of the lake environment, and then segment the collected lake images through the grid method to obtain a two-dimensional coordinate grid map of the lake and set the starting point, target point and multiple sampling points.
[0032] Specifically: first, the lake surface image is divided into grids of equal size to form a grid map; obstacles in the environment are set as black grids, and feasible areas are set as white grids. Use two-dimensional coordinates to select and set the starting point, target point and multiple sampling points in the grid map.
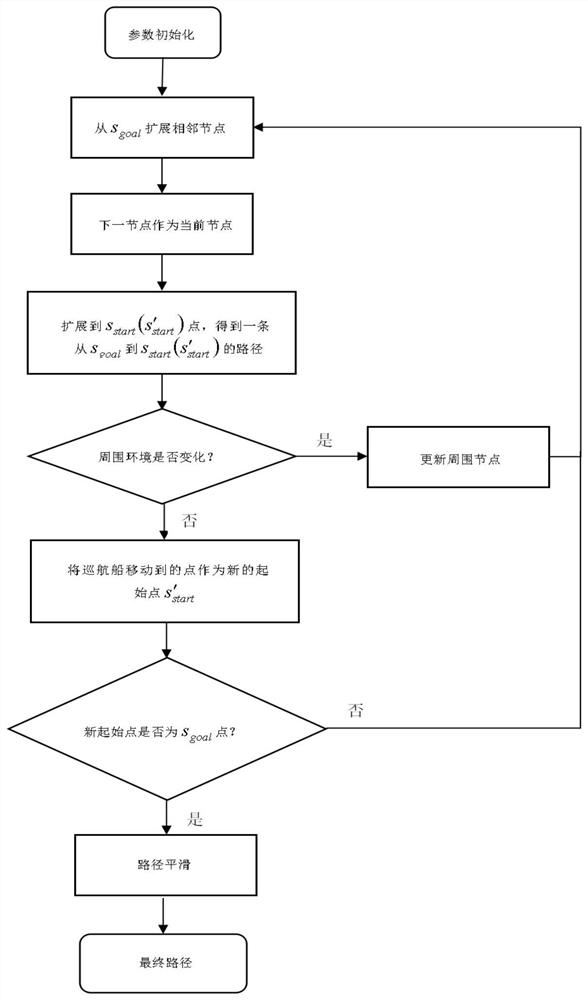
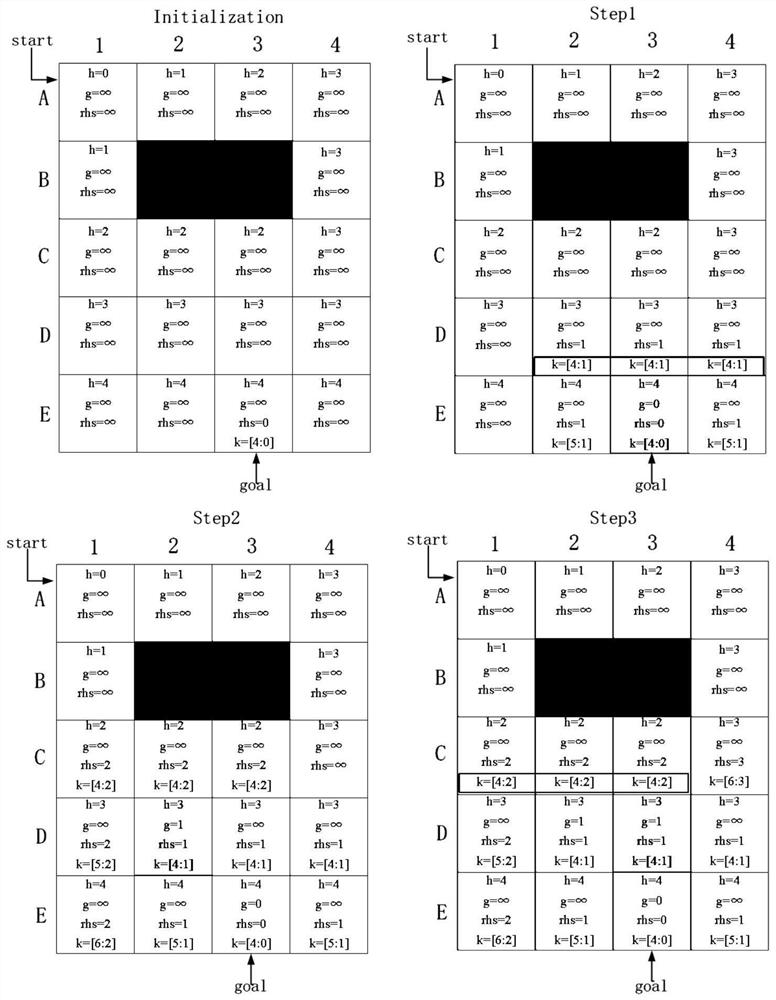
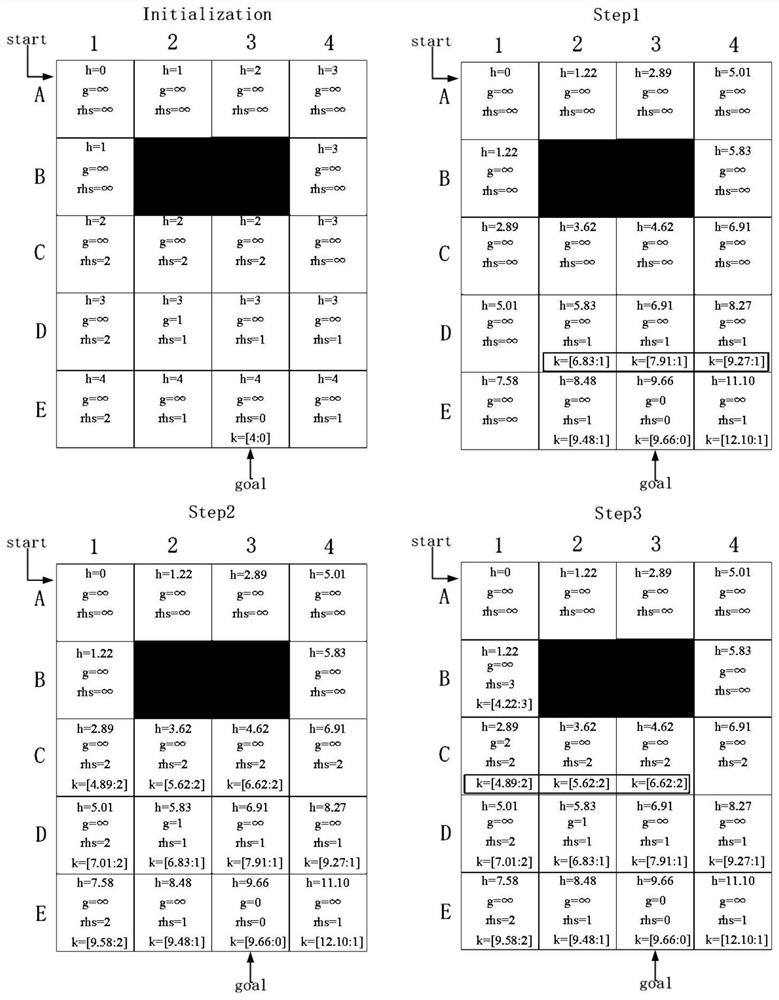
[0033] Step 2: Use the improved D*Lite algorithm to calculate the optimal grid path between the starting point and the target point in the grid map.
[0034] like figure 1 As shown, the specific process is:
[0035] Step 201: Initialize each grid, wherein t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More