

Cooperative control method of Stewart platform
A collaborative control and platform technology, which is applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of uncoordinated telescopic length of electric cylinders and difficult control, and achieve the effects of improving synergistic effects, reducing deformation, and reducing joint burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
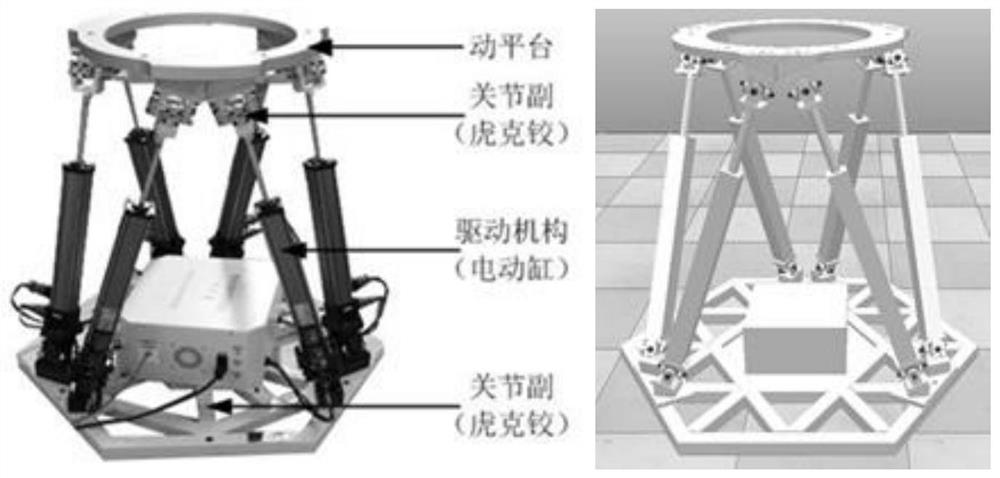
[0042] In order to clearly describe the motion of the stewart, the kinematic modeling of the platform is performed first.
[0043] Such as figure 1 As shown in , put all the electric cylinders to the neutral position, that is, extend half of the full-scale length as the initial reference pose of the Stewart platform. Such as figure 2 As shown in , the line connecting the two adjacent endpoints farther away from the base platform is parallel to the viewing angle, and starting from the left point, mark the hinge point B clockwise. 1 , B 2 , B 3 , B 4, B 5 , B 6 , and the electric cylinders connected to it are respectively marked as P at the hinge point of the moving platform 1 ,P 2 ,P 3 ,P 4 ,P 5 ,P 6 , the hinge points of the base platform and the moving platform are denoted as B i ,P i .
[0044] Establish the base platform coordinate system O B -X B Y B Z B and moving platform coordinate system O P -X P Y P Z P , where the origin of the base coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More