

Industrial robot disordered grabbing method based on double-clamp real-time switching
A technology of industrial robots and double grippers, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as potential safety hazards, reduced production efficiency, and low grasping success rate, so as to avoid collisions, ensure stability, and improve flexibility. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Embodiments of the present invention will be described in detail below in conjunction with examples, but those skilled in the art will understand that the following examples are only used to illustrate the present invention, and should not be considered as limiting the scope of the present invention.
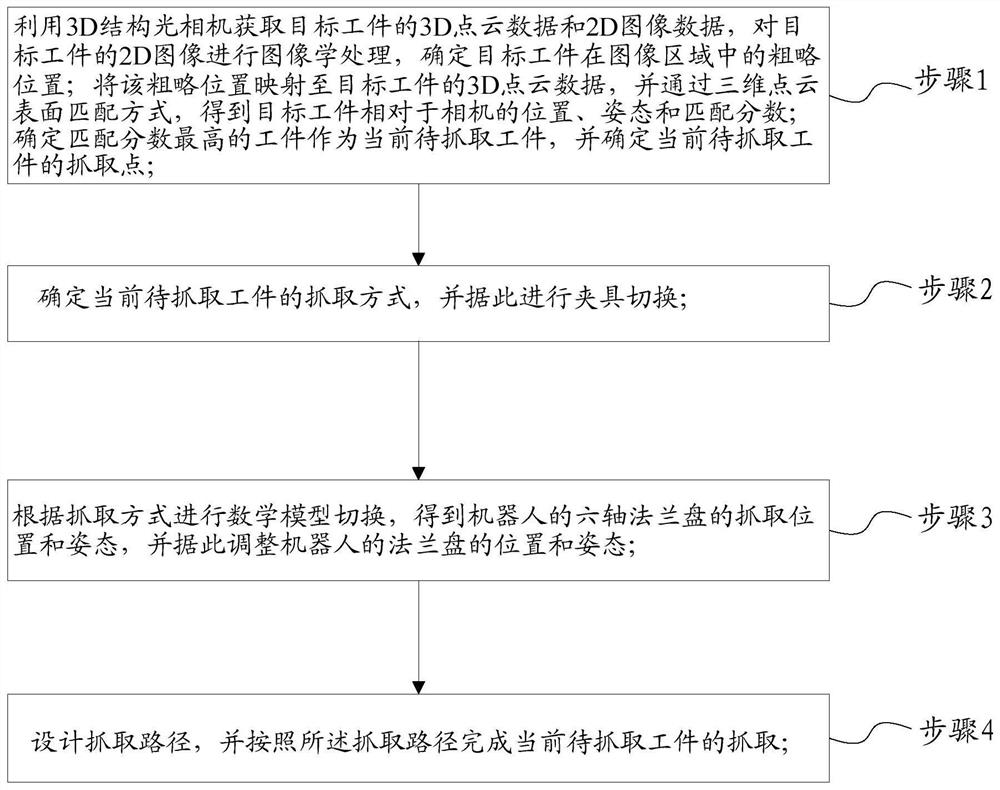
[0046] refer to figure 1, the present invention provides a disorderly grasping method for an industrial robot based on double-clamp real-time switching, the robot is a six-axis robot with a six-axis flange, and a tool is installed on the six-axis flange, and the tool includes Suction cups and grippers are two kinds of fixtures. In this embodiment, the robot is a mechanical arm, and the end of the mechanical arm is a tool. The tool includes two independent grabbing tools, and each grabbing tool has a telescopic actuator and Clamps at its ends, i.e. suction cups and grippers.
[0047] The fetching method includes the following steps:
[0048] Step 1: Use the 3D structured...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More