

Unmanned ship navigation planning method in complex water area environment
A technology for unmanned boats and water areas, applied in navigation, surveying and navigation, navigation calculation tools, etc., can solve the problems of potential threats to the planned path, inability to complete navigation tasks in complex water areas, and inability to obtain navigation environment information, etc., to solve environmental problems Dynamic and changeable problems, the effect of solving the problem of autonomous navigation of unmanned boats in dynamic uncertain and complex waters navigation environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and through specific embodiments. The following embodiments are only descriptive, not restrictive, and cannot limit the protection scope of the present invention.
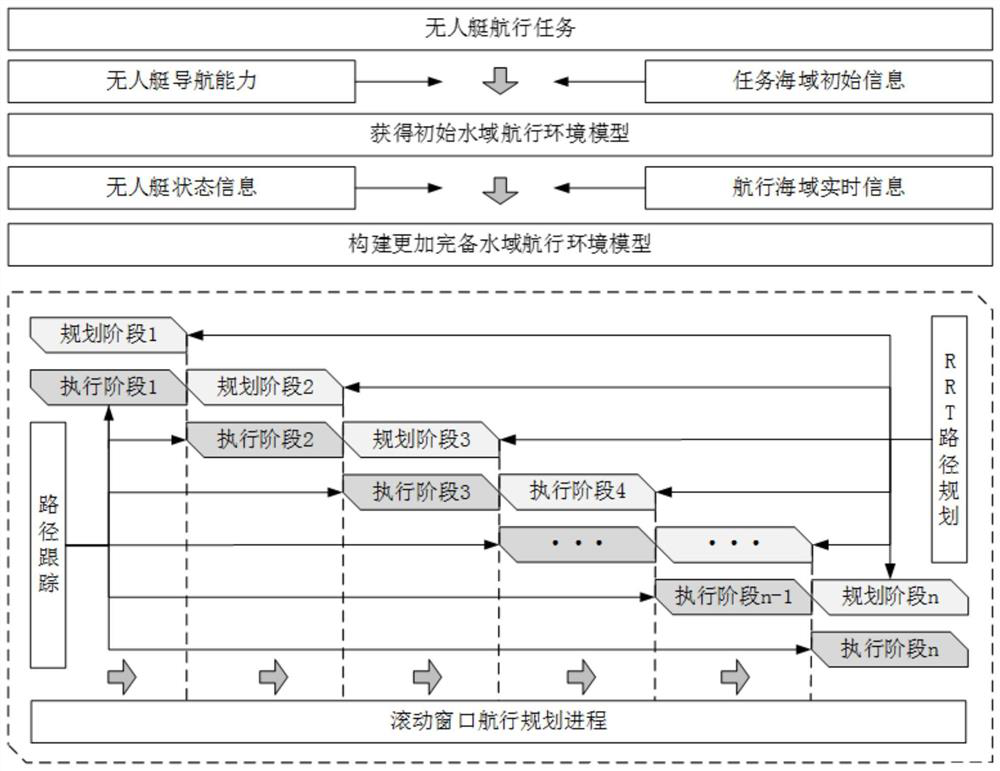
[0034] Aiming at the shortcomings of existing unmanned boats navigating in complex waters, complete water environment information cannot be obtained, and global planning cannot be completed in a dynamic and changeable environment, the present invention proposes: the rolling window navigation planning strategy is to be used during the navigation process of unmanned boats. At the same time, it perceives and improves the environmental information of the water area, and replaces the global path planning with segmented local path planning.
[0035] see figure 1 , the specific implementation steps of the present invention are as follows:
[0036] Step 1, according to the task requirements of the unmanned ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More