

Autonomous positioning method for robot
An autonomous positioning and robot technology, which is applied in the directions of instruments, image analysis, image enhancement, etc., can solve problems affecting the positioning accuracy of robots, and achieve the effects of improving image alignment accuracy, enhancing constraint relationships, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0038] In the present embodiment, the autonomous positioning method of the robot comprises the following steps:
[0039] 1) The robot collects images of the current environment through the camera.
[0040] 2) Convert the current frame image collected by the camera and the reference image selected as the positioning reference into the HSI color space to obtain three components of H, S, and I.
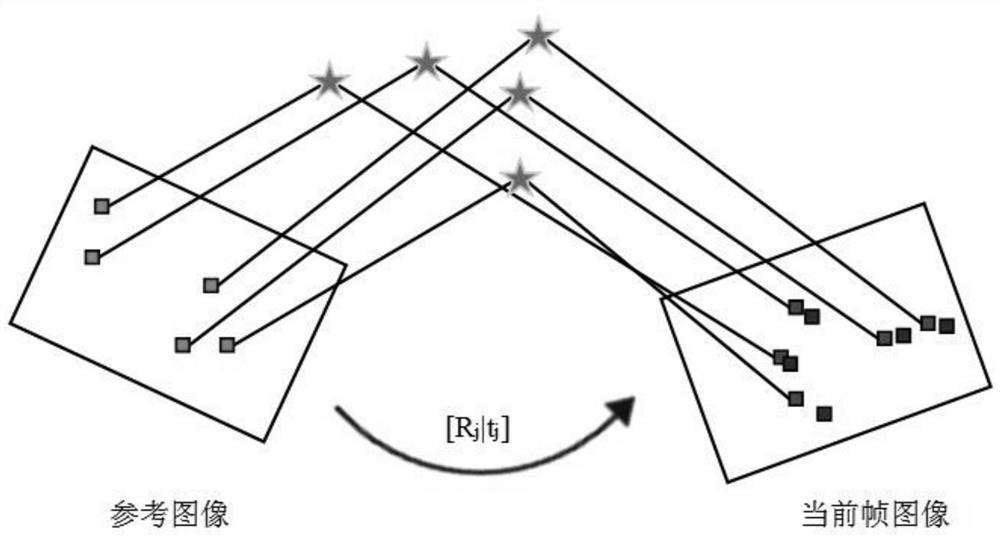
[0041] 3) Extract the point P in the real environment space from the reference image j The projected point p in the reference image 1 j :
[0042]
[0043] pixel The grayscale value of The color components are represents the projected point the number of rows in the image array, represents the projected point the number of columns in the image array, projected point The image coordinates of .
[0044] In the above formula (1), K is the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More