

Pneumatic soft-bodied torsion actuator based on cavity body structure design
A technology of structural design and drive, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as application scenarios that are difficult to meet load requirements, and achieve the effects of large strain, strong environmental adaptability, and good safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
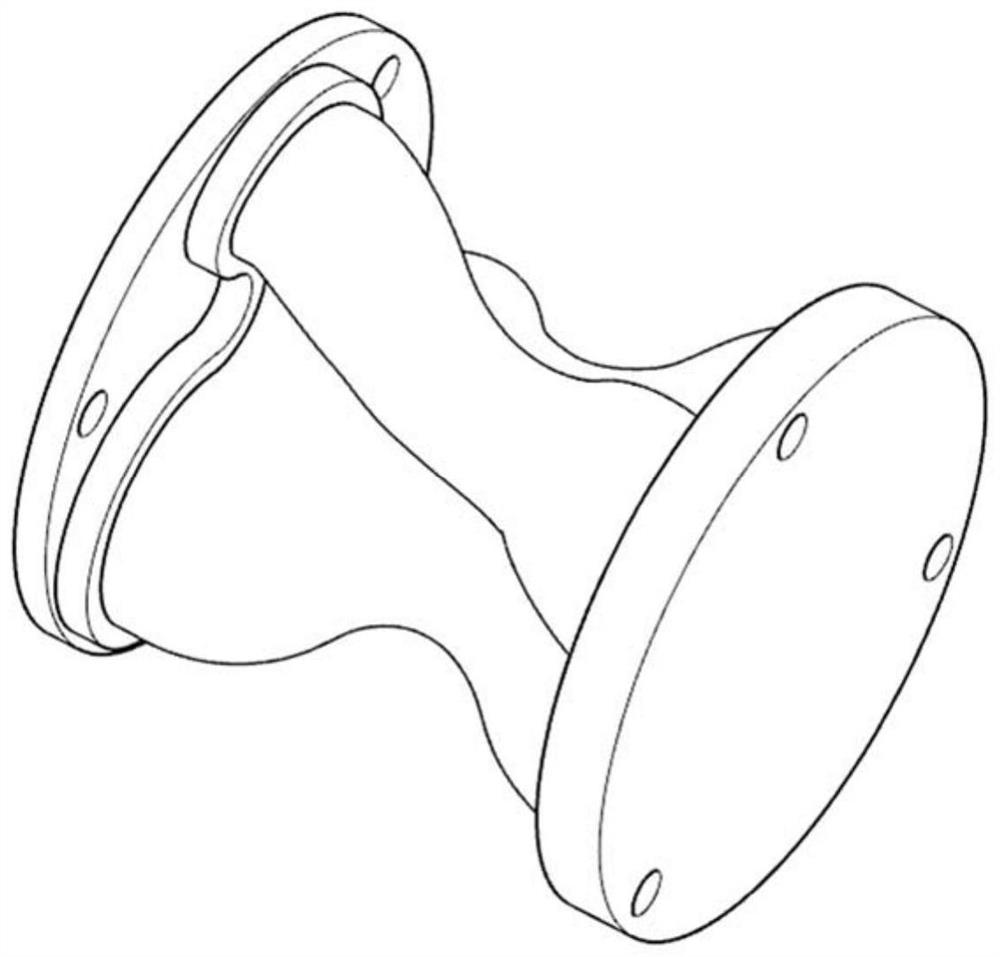
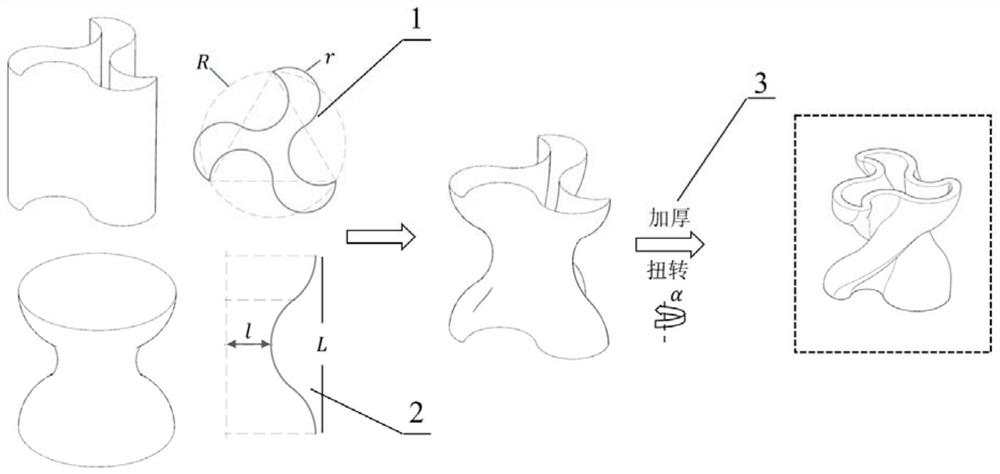
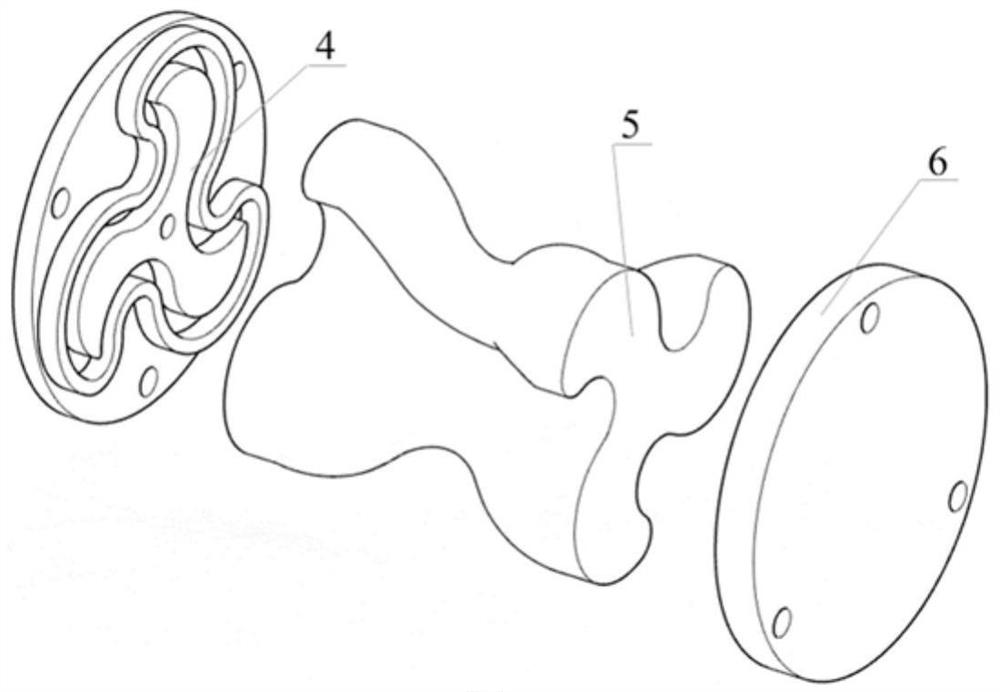
[0030] Such as Figure 1 to Figure 4 As shown, according to the present invention, a pneumatic software torsion actuator based on cavity structure design includes a cavity, a top flange, a bottom end cover and a connecting rod, wherein: the top flange is provided with a Matching top mounting groove; the bottom end cover is provided with a bottom mounting groove matching the bottom profile of the cavity; the top and bottom of the cavity are respectively fitted and connected with the top flange and the bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More