

Multi-degree-of-freedom surgical instrument with independently moving forceps blades and end effector
A technology of end effector and instrument rod, applied in the directions of surgery, surgical forceps, transmission device, etc., can solve the problems of limiting the flexibility of the forceps and poor flexibility of the end effector.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Referring to the accompanying drawings, the present invention will be further described in detail with specific embodiments.
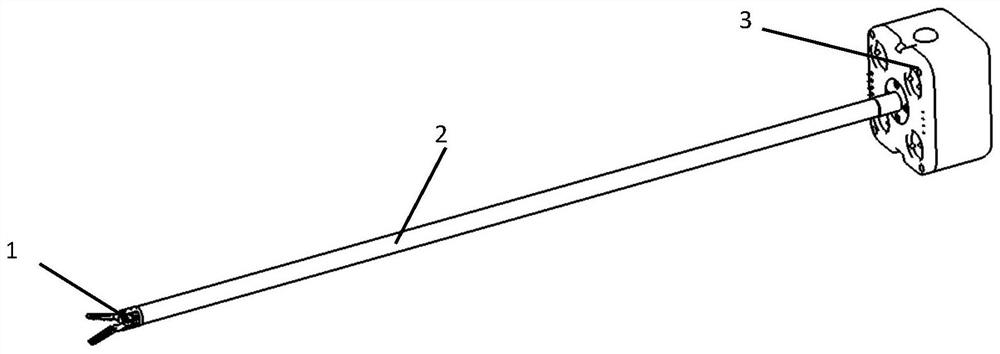
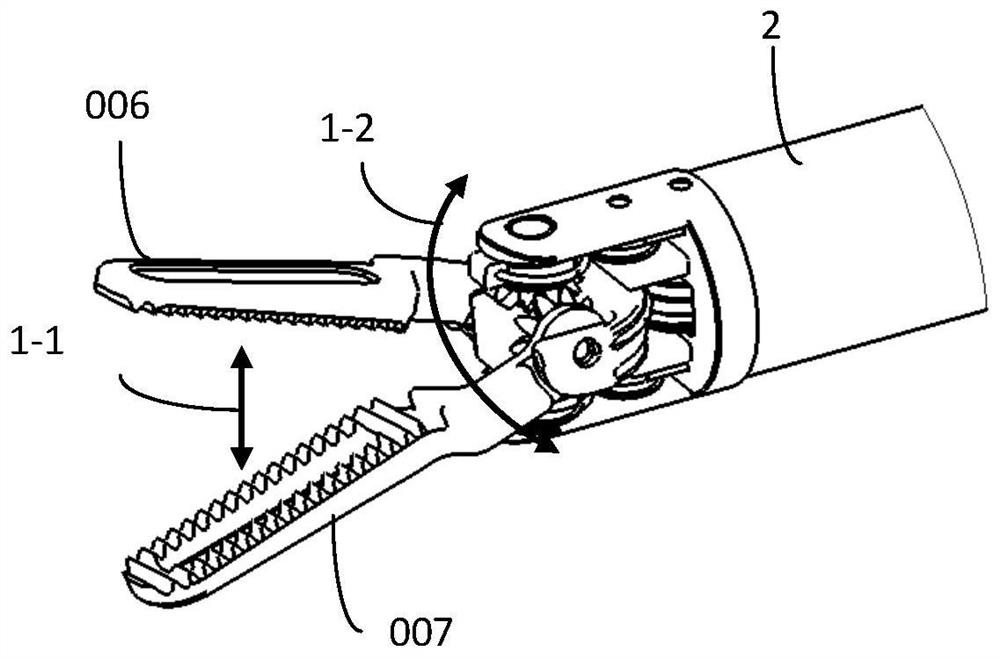
[0068] Such as figure 1 As shown, the multi-degree-of-freedom surgical instrument with independent movement of the jaws includes an end effector 1, an instrument shaft 2, and an instrument case 3. The instrument shaft 2 is connected to the instrument case 3, and the end effector 1 is connected to the instrument shaft 2. The structure of the prior art, the instrument rod 2 adopts the structure of the prior art. Such as figure 2 As shown, the end effector 1 has two jaws, the first jaw 006 and the second jaw 007 can be opened and closed, and can also be deflected.
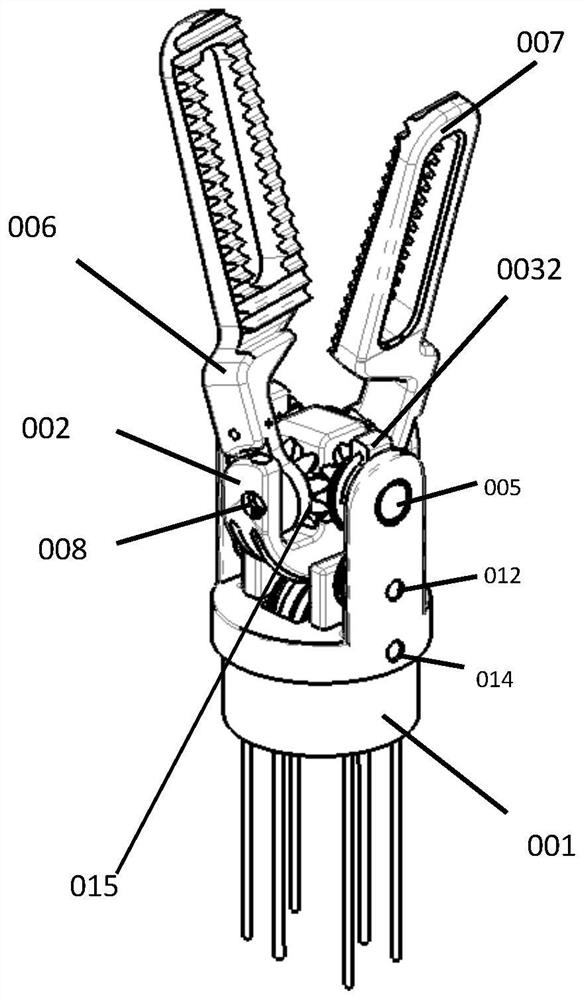
[0069] Such as image 3 with 4 shown. The end effector 1 includes a support base 001, a pitch ring 002, a first driving wheel 003-1, a first driving gear 003-2, a second driving wheel 004-1, a second driving gear 003-3, and a first driven gear 015, the second driven gear 016, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More