

Method and device for planning initial pose of surgical arm of endoscopic surgical robot
A laparoscopic surgery and initial position technology, which is applied in the field of initial pose planning of the surgical arm of the laparoscopic surgical robot, can solve the problems of surgical arm collision, medical staff who do not understand the robot, and difficulty in reaching the target area, so as to ensure operational performance, Enhance work efficiency and reduce workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
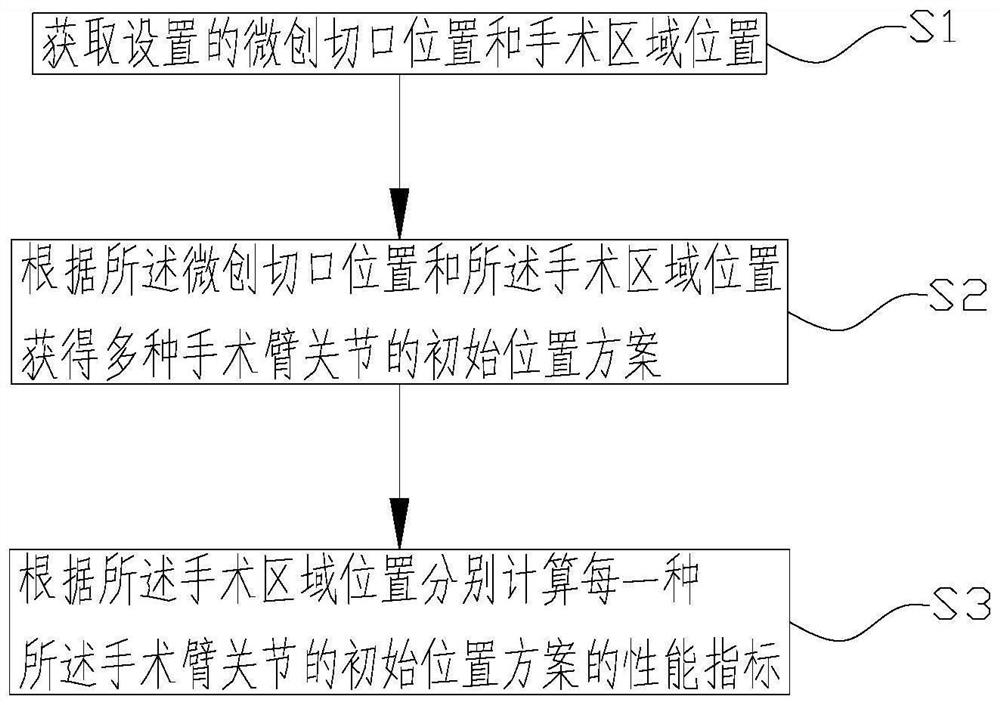
[0038] Such as figure 1 As shown, a method for planning the initial pose of the surgical arm of a laparoscopic surgical robot according to an embodiment of the present invention includes:
[0039] Step S1: Acquiring the set minimally invasive incision position and surgical area position;
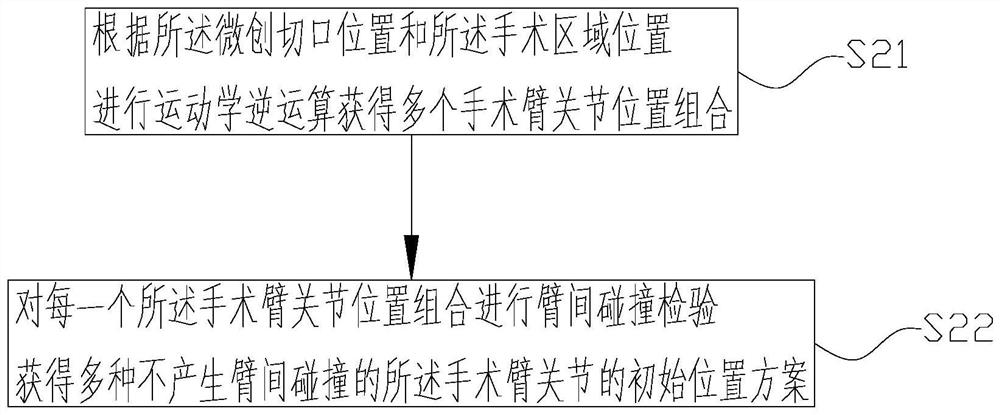
[0040] Step S2: According to the position of the minimally invasive incision and the position of the surgical field, various initial position schemes of the surgical arm joints are obtained;
[0041] Step S3: Calculate the performance index of each initial position scheme of the joint of the surgical arm according to the position of the surgical field.
[0042] In this embodiment, the control system obtains the set minimally invasive incision position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More