

Multi-legged robot load balancing method and device and multi-legged robot
A multi-legged robot and balance technology, which is applied in manipulators, motor vehicles, transportation and packaging, etc., can solve problems such as loss of balance and poor stability, and achieve the effect of ensuring a balanced state and good trunk posture control effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
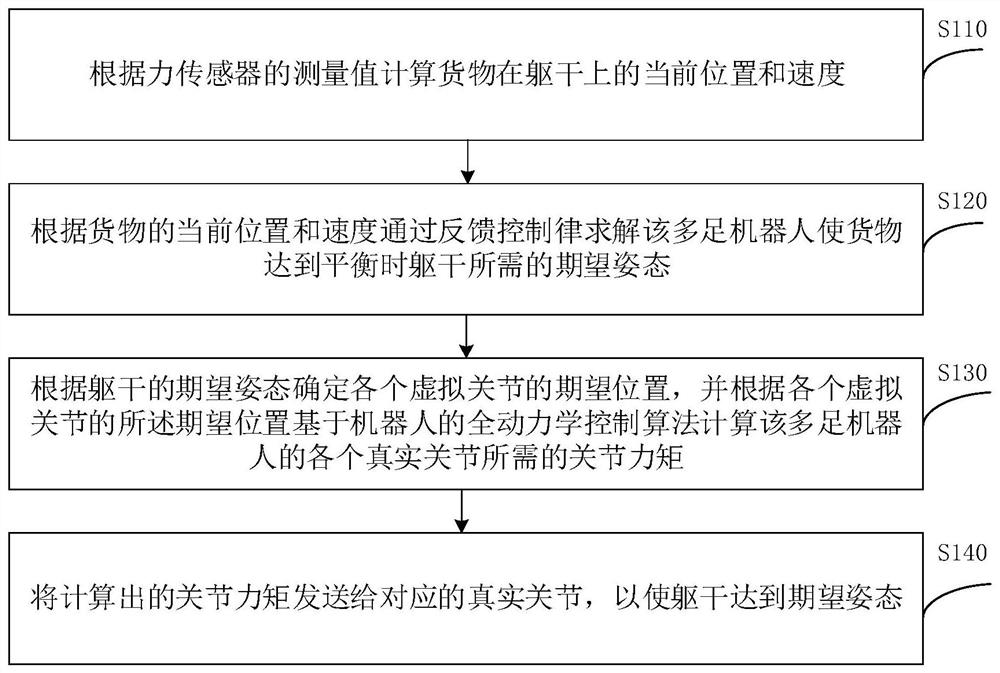
[0069] Please refer to figure 1 , this embodiment proposes a multi-legged robot load balancing method, which can be applied to various occasions where multi-legged robots are used for cargo transportation. This method detects the state of the goods placed on the torso in real time and performs active balancing, not only does not require the type and shape of the goods, but also ensures that the goods will not fall even during fast walking.
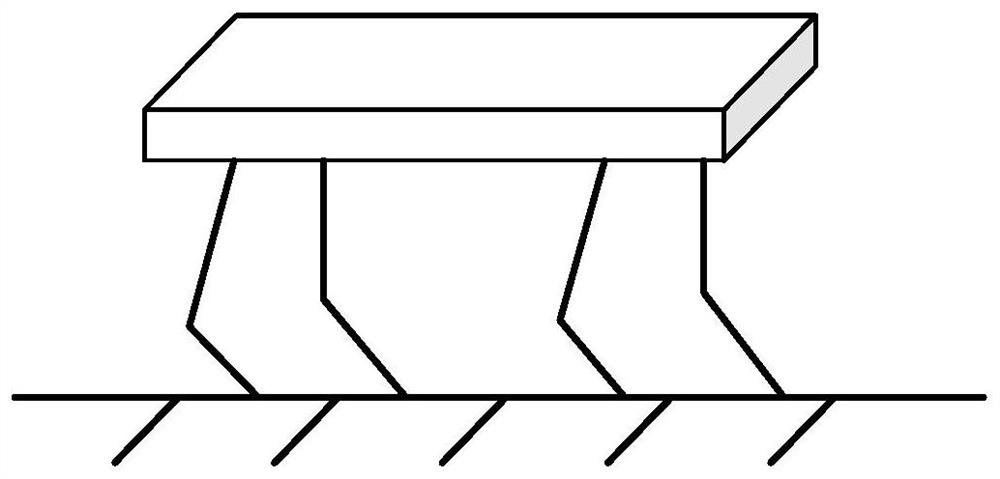
[0070] Exemplarily, the multi-legged robot generally refers to a robot with at least three legs, such as a three-legged robot, a quadruped robot, a hexapod robot, etc., for example, figure 2 A simplified structure diagram of a quadruped robot is shown. In this embodiment, a corresponding force sensor is provided on the torso of the multi-legged robot, and then the position and velocity of the goods on the torso are fed back and calculated by using the detection results of the force sensors, so as to realize the balance control of the goo...
Embodiment 2
[0167] Please refer to Figure 7 , based on the method of the above-mentioned embodiment 1, this embodiment proposes a multi-legged robot load balancing device 100, wherein a force sensor is provided on the trunk of the multi-legged robot, and the state of the trunk is passed between the trunk and the origin of the world coordinate system The motion state description of several constructed virtual joints.
[0168] Exemplarily, the load balancing device 100 of the multi-legged robot includes:
[0169] The cargo state calculation module 110 is used to calculate the current position and speed of the cargo on the torso according to the measured value of the force sensor.
[0170] The expected attitude solving module 120 is used to solve the expected attitude of the torso required by the multi-legged robot to balance the goods according to the current position and velocity of the goods through a feedback control law.
[0171] The joint torque solving module 130 is used to determi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More