

Robust optimal control method of trolley inverted pendulum system based on departure strategy reinforcement learning
A technology of reinforcement learning and optimal control, applied in the direction of adaptive control, general control system, control/adjustment system, etc. The effect of early convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The robust optimal control method of the trolley inverted pendulum system based on out-of-the-box reinforcement learning includes the following steps:
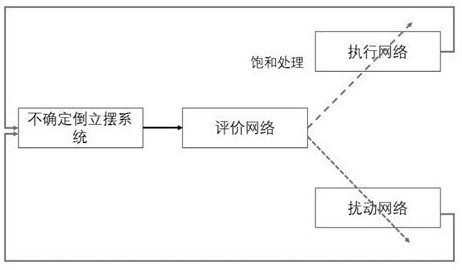
[0023] Step 1. Aiming at the tracking problem of the inverted pendulum system, the dynamic model of the inverted pendulum system is established, and the inverted pendulum system is abstracted into a continuous-time affine nonlinear system considering the influence of external disturbance and unmodeled dynamics. Then, the augmented system consisting of tracking error system and signal generation system of the trolley inverted pendulum system is constructed by means of state augmentation.
[0024] Define the state vector after dimension increase where e(t) is the tracking error, y m (t) is the reference signal, then the following time-invariant system is composed of the tracking error system and the signal generation system
[0025] Step two, according to the knowledge of game theory, deduce the solution of the time-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More