

Track constraint target tracking method based on continuous time trajectory function
A technology of time trajectory and target tracking, which is applied in the fields of target tracking and information fusion. It can solve problems such as equality constraint information ignoring model equivalence relations, etc., achieve high-precision estimation and prediction, and overcome the effect of low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
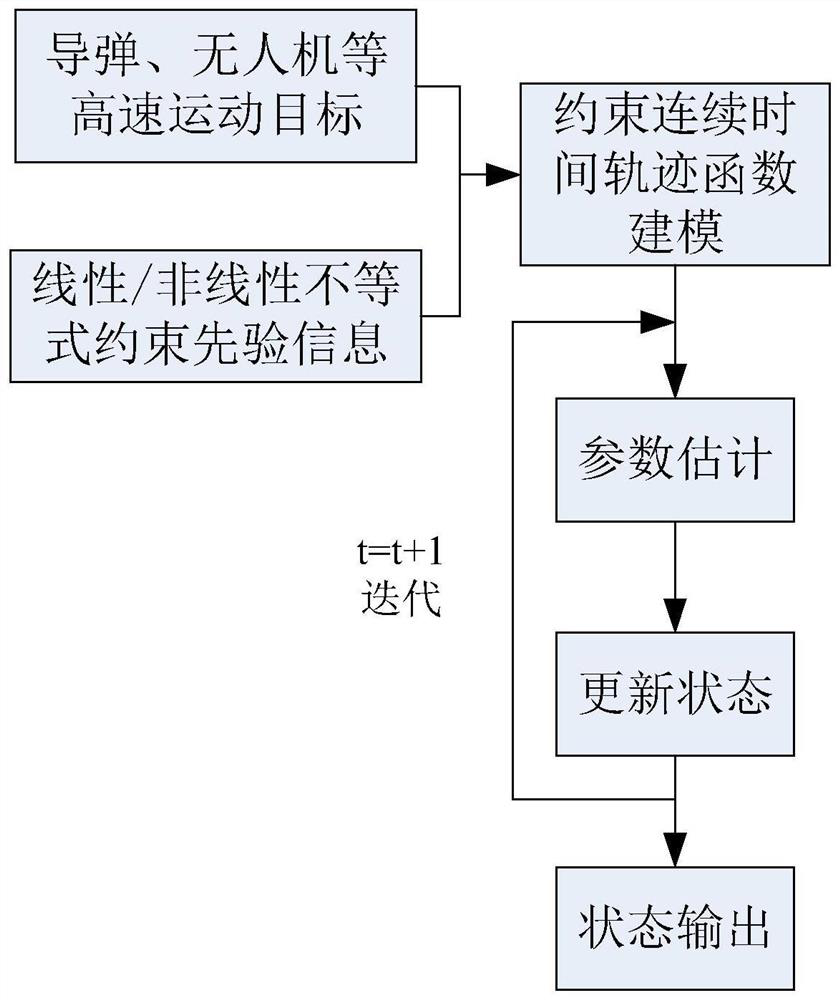
[0038] refer to Figure 1-5 . The specific steps of a track-constrained target tracking method based on a continuous-time trajectory function of the present invention are as follows:
[0039] Step 1. Simulate the scene.
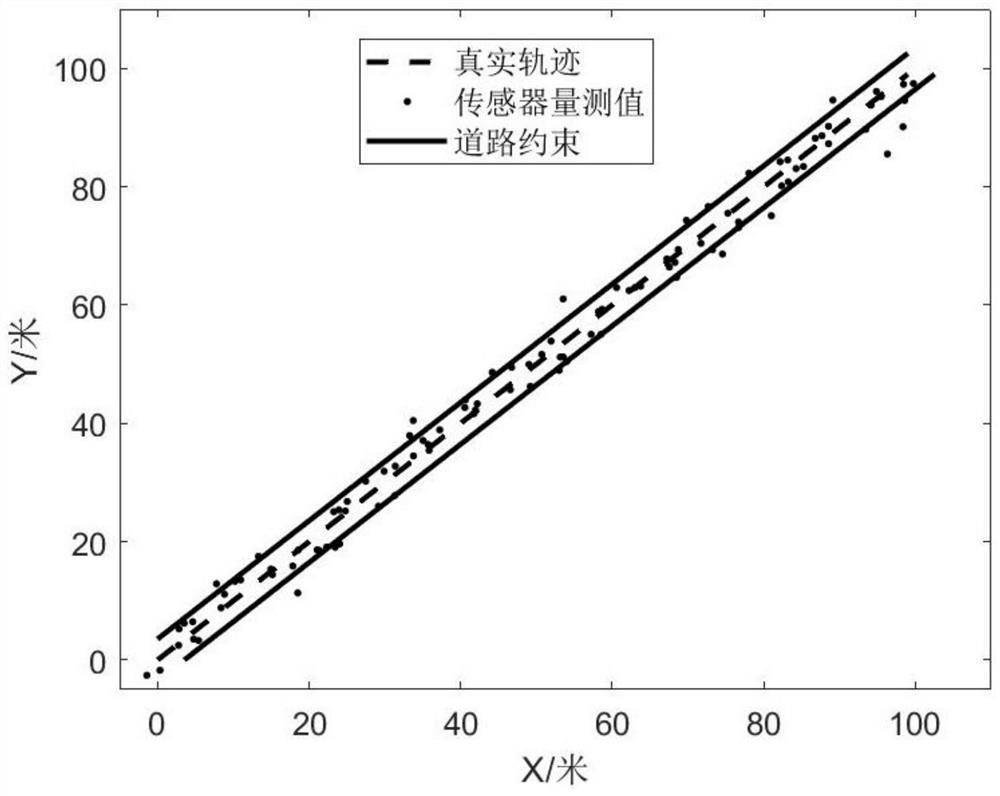
[0040] The simulation scene is set on a two-dimensional coordinate plane, and two simulation scenes are set. In scene 1, the target moves in a straight line at a uniform speed, and the target motion state is constrained by linear inequality; in scene 2, the target moves in a circle, and the target motion state is constrained by nonlinear inequality. The motion models are as follows:
[0041]
[0042]
[0043] where x 1 t and x 2 t Respectively represent the motion state of model 1 and model 2 at time t, T represents the sampling interval of simulation time, r represents the radius of circular motion, θ 0 Indicates the initial angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More