

Storage robot path optimization method based on ant colony algorithm
An ant colony algorithm and robot technology, applied in the field of warehousing and logistics, can solve the problems of increasing the complexity of storing and retrieving goods, and achieve the effect of suppressing falling into local optimum, reasonable method and steps, and easy to popularize and use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
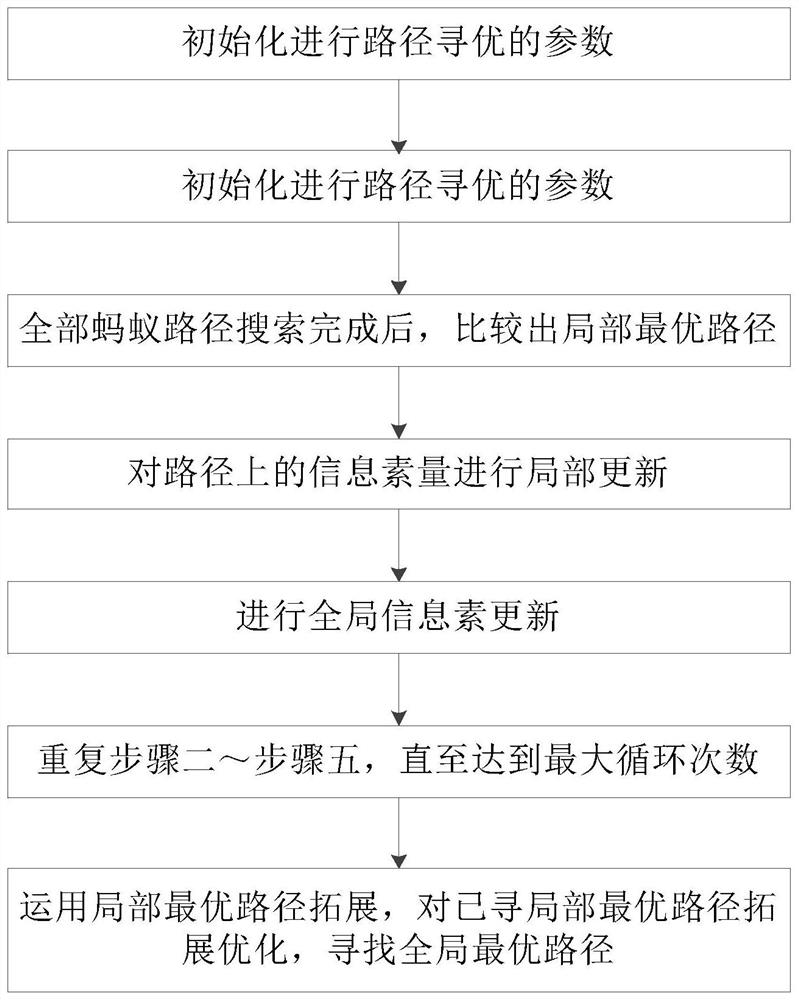
[0020] like figure 1 As shown, the storage robot path optimization method based on ant colony algorithm of the present invention comprises the following steps:
[0021] Step 1. Initialize parameters for path optimization;
[0022] Step 2, each ant performs a path loop search;
[0023] Step 3: After searching all the ant paths, compare the local optimal paths;
[0024] Step 4. Partially update the amount of pheromone on the path;
[0025] Step five, update the global pheromone;
[0026] Step 6. Repeat steps 2 to 5 until the maximum number of cycles is reached;
[0027] Step 7. Use the local optimal path extension to expand and optimize the searched local optimal path to find the global optimal path.
[0028] In this method, the parameters for path optimization described in step 1 include making time t=0, number of cycles N c = 0, the initial pheromone τ on the path from cargo location point i to cargo location point j ij =τ 0 , the number of ants is m, and the taboo lis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More