A 3D target detection method that does not need to be processed after processing
A target detection and 3D technology, applied in the field of computer vision, can solve problems such as structural incompatibility, and achieve the effect of saving time and expense
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be pointed out that the following embodiments are intended to facilitate the understanding of the present invention, but do not have any limiting effect on it.
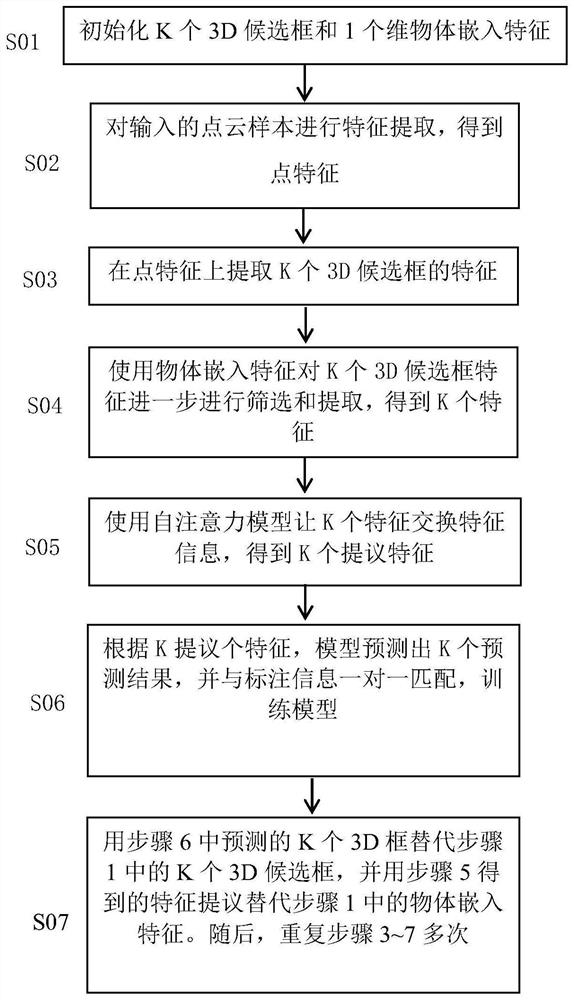
[0031] like figure 1 As shown, a 3D object detection method without post-processing operation includes the following steps:
[0032] Step 1, in the target area, initialize K 3D candidate boxes and 1 object embedding feature. Both candidate boxes and object embedding features are learnable. As the training progresses, the object embedding feature encodes the general features of the object to be detected, denoted as E ∈ R 1×C , where C represents the feature dimension;
[0033] Step 2, using the existing feature extraction model PointNet adopted by VoteNet to perform feature extraction on the input point cloud samples. For details, please refer to "Deep Hough Voting for 3D Obj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More