Grid map optimization method, storage medium and mobile robot
A grid map and optimization method technology, which is applied to instruments, image analysis, image data processing, etc., can solve problems such as inaccurate positioning, unsightly grid maps, and difficulties in beautifying grid maps, and achieve the effect of improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0064] In order to solve the above-mentioned technical problems existing in the prior art, an embodiment of the present invention provides a grid map optimization method.
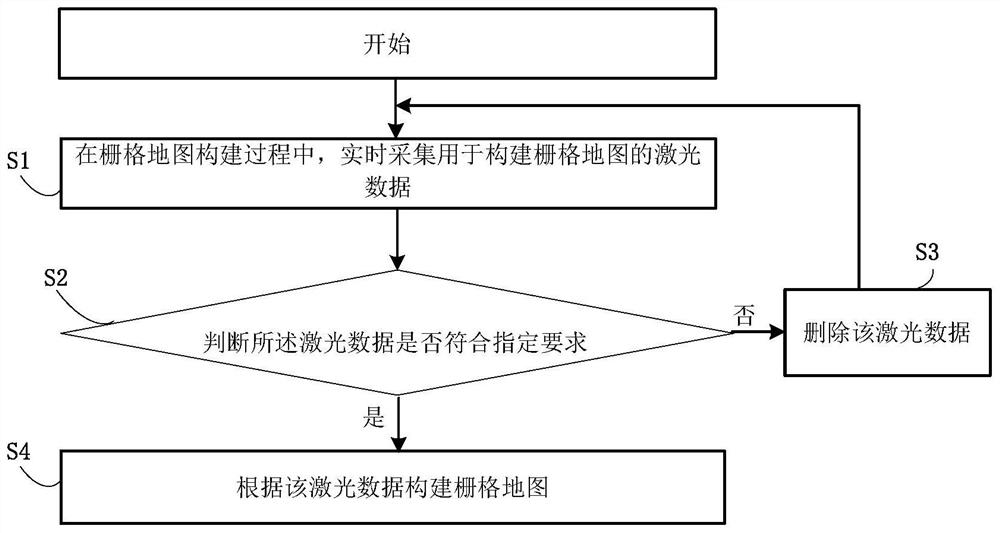
[0065] refer to figure 1 , the raster map optimization method of the present embodiment, comprises the following steps:
[0066] S1, during the construction of the grid map, real-time collection of laser data for the construction of the grid map;
[0067] In this embodiment, the grid map is constructed through the following steps:
[0068] The laser radar of the mobile robot is used to collect the environmental information within the viewing angle, and the synchronous positioning and map construction algorithm is used to process the environmental information to construct a pre-constructed grid map.
[0069] S2, judging whether the laser data meets specified requirements:
[0070] If not, execute step S3;
[0071] If yes, execute step S4;
[0072] S3, delete the laser data, and return to step S1;
[0...
Embodiment 2
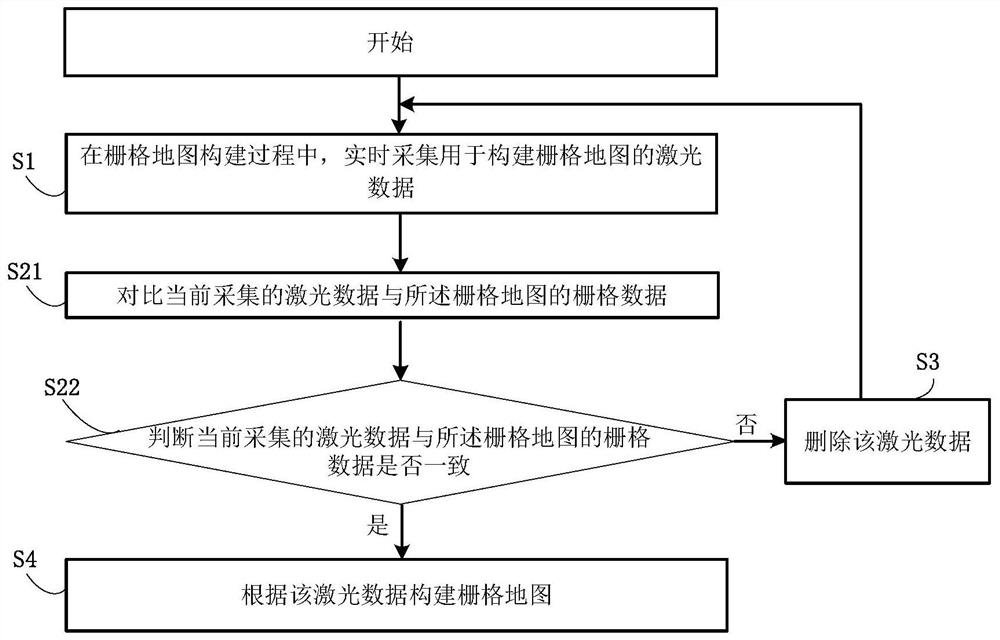
[0076] In order to solve the above-mentioned technical problems existing in the prior art, the embodiment of the present invention provides a grid map optimization method based on the first embodiment, wherein, the grid map optimization method in the embodiment of the present invention performs step S2 in the first embodiment Improve.
[0077] refer to figure 2 , the raster map optimization method of the present embodiment, comprises the following steps:
[0078] S1, during the construction of the grid map, real-time collection of laser data for the construction of the grid map;
[0079] S21, comparing the currently collected laser data with the grid data of the grid map;
[0080] S22, judging whether the currently collected laser data is consistent with the grid data of the grid map:
[0081] If not, execute step S3;
[0082] If yes, execute step S4;
[0083] S3, delete the laser data, and return to step S1;
[0084] S4, constructing a grid map according to the laser d...
Embodiment 3
[0127]In order to solve the above-mentioned technical problems existing in the prior art, an embodiment of the present invention provides a grid map optimization method based on Embodiment 2, wherein the grid map optimization method of the embodiment of the present invention is applied to a sweeper.
[0128] The raster map optimization method of this embodiment includes the following steps:
[0129] The first step is to start building the map when the sweeper starts (under no special circumstances, the sweeper is stationary or going straight, and there will be no rotation), and the first frame of laser is mapped on the map;
[0130] In the second step, starting from the second frame (if the laser is frequency-reduced, it will be the next frame after the frequency reduction), for the new hit position constructed by each beam of laser on the grid map, judge Whether the hit position already exists on the grid map before the new hit position in the laser propagation direction:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More